
基于交通轨迹数据的三维动态噪声地图
1 引言 噪声是影响居民幸福感的重要因素,是城市环境污染四大公害之一[1],对噪声信息可视化表达在环境监控与分析中具有重要意义。由于噪声是不可见的,借助地图可对抽象信息可视化的优势,使用多信息、多形态的符号,直观表现噪声的强度及相关信息,可以为治...
- 作者:付乐宜, 艾廷华, 黄丽娜, 信睿.来源:地球信息科学学报|2021年01月12日
1 引言
噪声是影响居民幸福感的重要因素,是城市环境污染四大公害之一[1],对噪声信息可视化表达在环境监控与分析中具有重要意义。由于噪声是不可见的,借助地图可对抽象信息可视化的优势,使用多信息、多形态的符号,直观表现噪声的强度及相关信息,可以为治理噪声提供参考,从而制定相关措施,改善生活环境。
噪声地图是一种根据特定噪声指标对某区域已存在或可预测的噪声数据,进行可视化表达的地图[2],通过视觉符号展示噪声的发声源、强度、传播模式等信息。噪声地图有不同的分类体系[3]:按噪声源可划分为交通噪声地图、工业噪声地图、建筑施工噪声地图、生活噪声地图等;按数据获取方式,可分为实测型、预测型和预测辅助实测型;根据绘制区域尺度,又可分为宏观区和微观区。
作为表达声学特征信息分布的专题地图,噪声地图具有很强的物理学领域知识支持。地图符号的设计与可视化表达,既要考虑噪声的声学数据处理与符号转换,同时还要顾及空间分布的地理学规律。噪声地图按展现维度可以分为二维平面和三维立体。平面地图是噪声可视化研究中最为主要的表现形式,它展示了地理空间下某一高度不同位置的噪声情况,主要通过数值注记、等值线和热力图传达信息[4]。Yasar等[5]对距地面一定高度的平面网格剖分以计算噪声值,再根据图例对区域分级上色完成制图。随着监测门槛的降低和可视化技术的发展,噪声有了更丰富的表达形式。基于使用智能手机的参与方式,Judicaël等[6]提出一种评估噪声环境的方法,以六边形为噪声符号单元,对手机采集的噪声数据进行整合分析,依次确定单个六边形符号的噪声值,参照图例对六边形进行填充表达,实现声环境评估。
与二维地图相比,三维噪声地图最大的特点在于具有纵向高度属性,其制作通常会使用GIS工具辅助完成。Jantien等[7]将二维TIN插值应用在三维建模中,通过ArcScene将噪声覆盖在三维城市模型表面,最终生成三维噪声地图。此外,三维噪声地图还可以用于模拟建筑层居民感知,关注人们生活区域受噪声的影响程度。根据香港地形建筑特点,Law等[8]将噪声建模与GIS、计算机图形学结合,通过LimA及三维噪声建模工具,对高层建筑物表面进行计算,模拟了香港高层城市景观的噪声情况。BIM和GIS系统的集成,可以在任意空间尺度上制作连续的噪声地图[9]。此外,Zhao等[10]提出了一种使用非结构化表面网格制作三维道路交通噪声地图的方法,该网格可以表示不同复杂程度的建筑物和道路。Cai等[11]提出了一种在超级计算机上计算大规模三维噪声地图的方法,可以减少大城市地区的计算时间。此方法包括了噪声预测模式以及在超级计算机上实现的并行计算算法。
从时态特征角度,噪声地图又可分为静态地图和动态地图。当前有关本领域提出的噪声地图大多为静态图,旨在展现过去某段时间内、某区域周围的平均噪声环境情况。而动态噪声地图更多关注噪声环境随时间的变化,它需要获取更长时间内的多个数据,以生成多时间段噪声图。Wei等[12]提出了一种基于高时间分辨率测量噪声值的模型,在多时间点测量并内插计算生成噪声图,每15 min更新一次,实现地图的动态展现。在另一个研究The LIFE DYNAMAP项目[13]中,整体的噪声地图由多个传感器获取的单源噪声值求和计算生成,在间隔时间点上切换地图,以实现噪声地图的即时更新。除了直接测量噪声数据外,还可以将人群作为传感器获取相关信息。基于投诉数据、社交数据、POI和道路网络数据,Zheng等[14]使用三维张量对纽约市的噪声情况进行建模,并结合上下文感知张量分解进行噪声推断,呈现了整个纽约市的噪声场景。在噪声信息表达方面,使用条形柱的高度和颜色表示某处噪声投诉的数量及噪声类型分布,用不同颜色的色块表示具体区域的噪声强度。提前准备好不同时间对应的噪声地图版本,实现动态噪声地图切换,从而对不同时间、不同地点、不同类型的噪声进行比较分析。基于Zheng等[14]的方法,Qin等[15]提出一种半监督张量完成算法,通过智能手机测量数据,实时传入NoiseSense系统,完成噪声地图的动态更新。
以往对噪声地图的研究主要侧重于数据获取和建模计算,无论是通过实地测量获取,还是使用噪声软件预测,均是在寻找使噪声数据更可靠的途径。在噪声地图形式上,主要有二维和三维、动态或静态,借助传统制图方法分级设色,辅以图例制成一幅热力图形式的噪声地图。对于传统的三维噪声地图,三维特征集中在表现对象如建筑物而非噪声符号本身,噪声仍以平面贴图形式为主。而在表达方面,用什么符号、哪些视觉参量表示,鲜有研究,大多循规蹈矩地使用不同颜色的面状色块,未能展现地图符号的信息丰富度。针对噪声符号表现形式单一的问题,本文从符号设计角度,设计三维符号表达二维平面的噪声强度信息:使用尺寸和颜色双重视觉变量设计三维噪声符号,在要素表达上,与传统面状符号相比,突出了噪声地图的专题性;噪声符号的间隔定位排列,既表达了大多数位置点的噪声信息,又能够较大程度地展示地理要素,增加了地图的载负量;添加时间维度,使用动态符号来模拟运动过程,有助于用户调动自身逻辑,分析要素变化特性,挖掘静态图无法传达的隐藏信息。
本研究基于动态符号的视觉变量,设计立体柱状的噪声符号,探索Web端的噪声三维动态可视化。以道路交通噪声为例,使用简化后的声环境导则模型,将交通轨迹数据推算为预测噪声数据;以Mapbox为地理底图,借助提供的API接口,在Web浏览器上将交通噪声数据表达为不同高度、颜色的噪声柱,最终实现噪声地图的三维动态显示。
2 交通噪声表达的物理学原理
交通噪声的传播阶段分为噪声源、传播途径和接收处。根据声源的几何形状和传播特点,可将噪声源分为点声源、线声源、面声源。在交通噪声中,单辆车数据被视为点声源;若多辆车连续分布同一直路上,可将其归为线声源。声源类型的判定需要参考相应的情景和相对关系。车辆行驶产生噪声,传播时经过距离衰减、多源叠加等因素最终形成道路交通噪声。
噪声受到大气、屏障等影响,传播过程中有一定的衰减消耗。噪声的衰减主要有几何发散、声屏障、大气吸收、地面吸收、反射等。点噪声源以球面形式向周围辐射,传播时能量随几何距离衰减[16],点声源衰减与距离呈一定负相关。我国常用的噪声评价指标为等效连续A声级,简称等效声级。等效声级把一段时间内噪声能量平均值等效为该时间下的噪声评价平均量。噪声值可以通过公式推算获得,基于已有噪声源信息,根据噪声传播特性,计算预测点的噪声值。在《HJ2.4—2009环境影响评价技术导则声环境》[17]提出的声导则模型中,它将声源点假设在道路中心位置,根据相关参数可预测行驶车辆对预测点产生的等效声级,其公式为:
式中:
在此基础上,参考《JTGB03—2006公路建设项目环境影响评价规范》 [18],对声导则模型简化,推导出较为理想状况下单个车辆噪声声级与速度、距离的关系:
式中:
除了考虑单个噪声源的传播之外,还要考虑多个独立噪声源传播到某点时的叠加。多个等效声级的叠加公式为:
式中:
3 噪声的三维可视化表达
3.1 噪声符号设计
动态地图的展示往往通过动态符号参量体现。动态符号作为其表现过程的形式,在视觉变量上有别于传统地图设计。传统地图中,地图符号的视觉参量包括形状、尺寸、方向、明度、密度、结构、颜色和位置等 [19] 。但在三维动态地图中,这一体系在表达动态特征上较为局限,需要在时间维度上添加参量以传达动态信息 [20]。艾廷华[21]在Bertin符号参量基础上扩展了4个动态参量:发生时长、变化速率、变化次序、变化节奏。动态参量的添加,增强了地图的吸引力,突出显示了空间定位,给具有属性变化的信息提供了广阔空间的地图表达[20]。
单个噪声符号的三维立体化,用以正方形为底、具有一定高度的方柱形式呈现。噪声柱的视觉变量主要使用尺寸、颜色、明度。噪声值越大,符号高度越高,噪声柱明度越高,由绿色向品红过渡;在动态参量上,引入了描述符号存在时间的发生时长和描述符号变化快慢程度的变化速率这2个参量,根据时间分辨率调整发生时长与变化速率,以传递相应比例尺下的变化状态。
在表达道路交通噪声时,为展现连续道路的噪声情况,需要使用多个噪声符号,这涉及到噪声符号的空间定位与排列设计。此外,还需考虑空间尺度变化下多层次信息的展现。
3.2 符号定位与排列
噪声符号的位置和排列依赖于道路载体。对道路交通噪声情况进行描述,考虑人的活动范围,以行人出现概率较高的区域——道路两侧为噪声表达区域。对道路两侧线段进行等分,确定符号离散间隔,等分端点为单个符号定位中心,符号排列沿道路方向。不同的空间分辨率下,对相邻点的间隔和符号尺寸有不同粒度的设置。图1展示了以一十字路口为例多层次的噪声柱投影。
图1
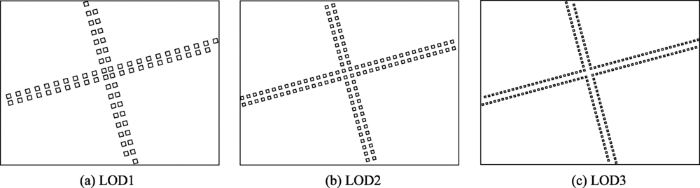
图1 简单道路模型多粒度的噪声柱投影
Fig. 1 Simple roads models' multi-granular noise bars projection
3.3 噪声传播表达
本节主要以示意图和具体数据的形式对传播过程中噪声的衰减、叠加和多步粒度效应表示,通过不同高度和对应颜色的噪声柱传递噪声信息。
噪声表达区域为道路两侧距地面高度1.5 m的平面,噪声符号落脚于地面,随着交通道路车流状况的变化,噪声柱高低起伏。
点声源的发散式传播引起随距离的几何衰减。以单点声源为例,对几何衰减进行表达。图2(a)展示了单点声源C1在车速为30.0 km/h时,沿道路噪声柱产生的波动效果。声源C1与最近噪声柱(记为噪声柱A)距离为7.5 m,沿道路排列的噪声柱间隔为20.0 m,噪声柱符号底面边长为10.0 m。从图中可以看出,距点声源最近的噪声柱A具有当前时刻的峰值高度,其他噪声柱以它为中心,沿前后道路方向衰减。将v=30.0 km/h,r=7.5 m代入式(2),计算得到噪声柱A处的噪声声级
图2
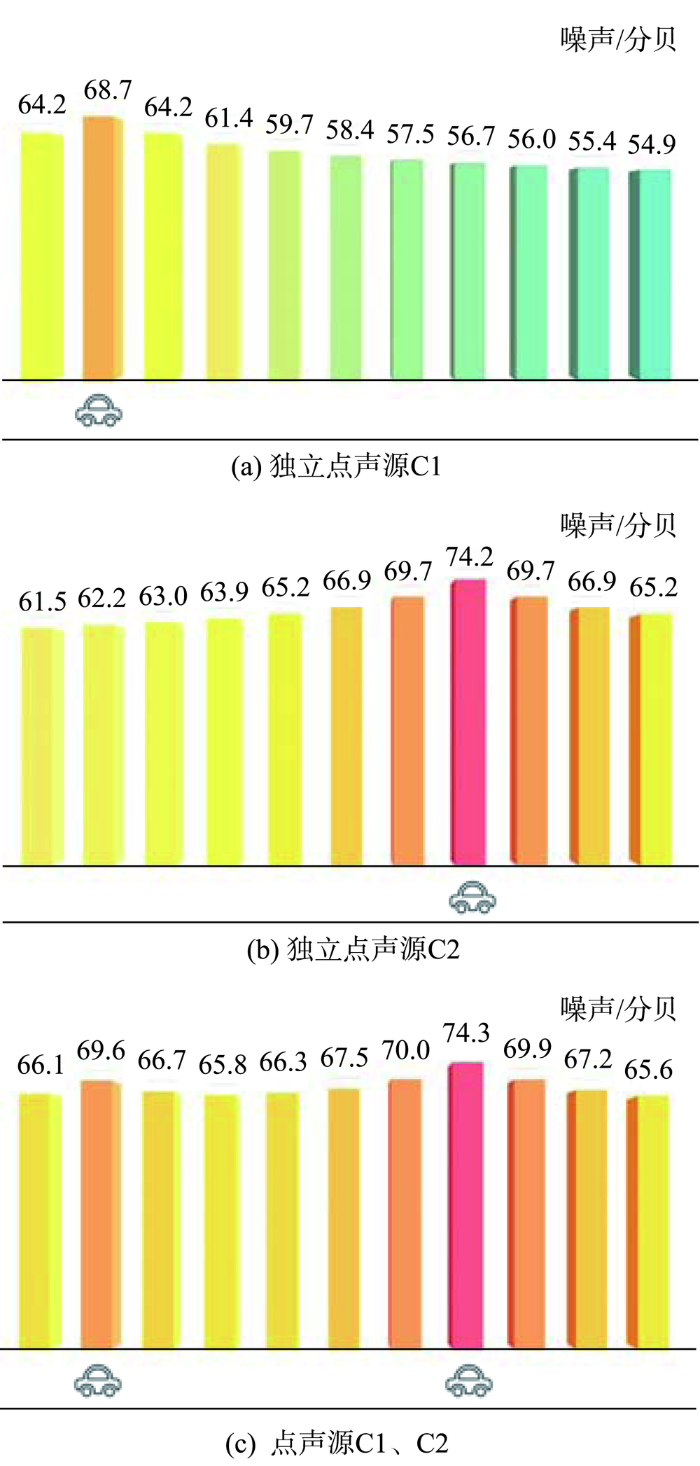
图2 单个点声源和2个点声源叠加的局部噪声
Fig. 2 Local noise of a single point sound source and two point sound sources
在实际生活中,道路上通常有多辆车同时行驶,多个发声源独立发声,传播到同一位置需对声级进行叠加以模拟真实效果。以多噪声源辐射声级的累加公式为基础,根据对应区域限速设置,在纵向上确立最高值,对多点声源的传递进行叠加模拟。以2个点声源传播为例,图2(a)和图2(b)分别展示了同一时刻独立声源C1、C2对同段道路某侧噪声柱产生的波动效果,其中点声源C1车速为30.0 km/h,C2车速v为50.0 km/h。图2(c)为同一时刻声源C1、C2同时作用于道路段的噪声叠加情况。以噪声柱A为例,对声级进行叠加计算。声源C2距噪声柱A的距离r为120.2 m,代入式(2)推算出独立声源C2对噪声柱A处产生的声级
除了在同一尺度下的衰减、叠加效应外,当空间分辨率改变,噪声图要切换为对应层级的符号底图,实现不同粒度变化的视觉效果。图3为点声源C1分别在3个地图层级下对同段道路噪声柱的影响情况。随当前地图细节层次的提高,噪声要素也进行符号尺寸和间隔排列的变化,以拟合当前比例尺,展现地图的多层次表达。
图3
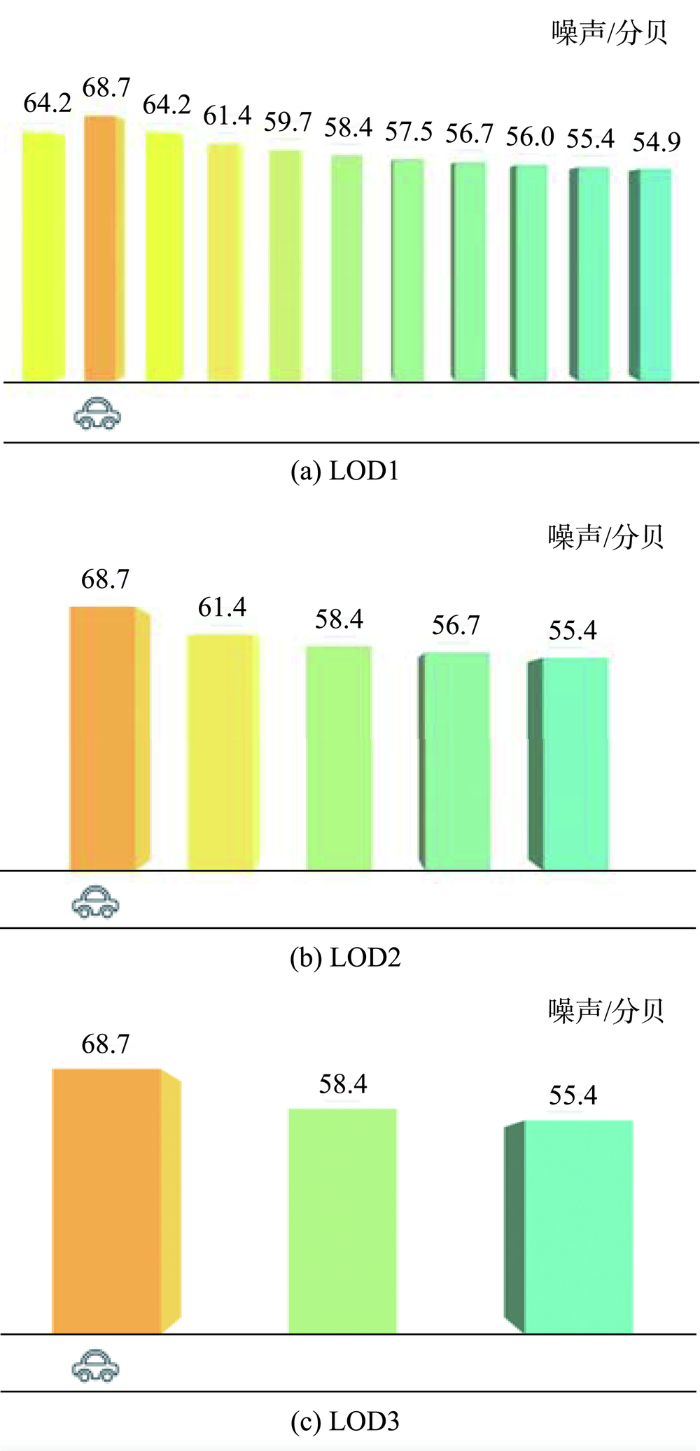
图3 多粒度下单个点声源的局部噪声
Fig. 3 Multi-granular local noise of a single point sound source
4 实验及结果分析
4.1 实验数据
噪声地图的绘制范围选为上海市黄浦区某一区域,其经度在121.447° E—121.488° E,纬度在31.221° N—31.251° N,投影矩形的宽高分别约为3.87 km、3.29 km。该区域内有若干条主要道路,属于繁华地带,车流量较多,符合本次研究目的要求。
本次实验以出租车GPS数据作为噪声数据来源,通过出租车轨迹数据和交通噪声模型推算得到噪声值。所选轨迹数据为2007年2月20日7:00—12:00内噪声地图区域的多辆出租车的GPS数据 [22] ,采样时间间隔为1 min左右,提前对数据进行筛选、清洗,转为json格式的标准数据。数据由若干条包含多点坐标的轨迹线组成,单个轨迹点数据包含车辆ID、时间、经纬度坐标等。考虑到异常数据和采样间隔时间的不均性,使用基于隐马尔科夫模型的地图匹配算法,对轨迹数据点进行道路路段匹配。并对该算法进行改进,根据采样时间节点对轨迹点进行内插,实现轨迹数据的连续性。
4.2 实验结果
Mapbox提供了动态、高性能的制图库和地图设计工具。在本次实验中,使用其Web端下多比例尺地图及相应的API接口,实现噪声地图的三维动态展现。
地图中不同空间分辨率对应的道路宽度不同,以Mapbox提供的Web端地图为例,在纬度为 31°24′ N处的缩放等级与像素表达、地图比例尺的对应关系如表1所示。
表1 地图缩放等级与像素表达、地图比例尺的对应关系
Tab. 1
| 缩放等级 | 像素大小/mm | 像素表达/(m/px) | 比例尺 |
|---|---|---|---|
| 13.5 | 0.275 | 5.777 | 1:24563 |
| 14.0 | 0.275 | 4.085 | 1:17369 |
| 14.5 | 0.275 | 2.888 | 1:12281 |
新窗口打开| 下载CSV
预测噪声点定位于道路两侧。从开源地图Open Street Map上下载道路网数据,通过ARCGIS相关工具对目标道路进行处理。本次研究选取3个等级对噪声进行多层次表达,参考Mapbox相应等级下的道路宽度和对应比例尺,设有多个等分间隔和底图尺寸组合,比较不同组合的噪声符号在整个地图幅面中的拥挤程度和地图载负量,选择视觉表达上较好的组合。表2和图4展示了不同缩放等级下对应的道路等分间隔和符号的底面尺寸。
表2 地图缩放等级与符号等分间隔和符号底图尺寸的对应关系
Tab. 2
| 细节层次 | 缩放等级 | 等分间隔/m | 符号底面正方形边长/m |
|---|---|---|---|
| LOD1 | 13.5 | 120.0 | 50.0 |
| LOD2 | 14.0 | 80.0 | 35.0 |
| LOD3 | 14.5 | 50.0 | 20.0 |
新窗口打开| 下载CSV
图4
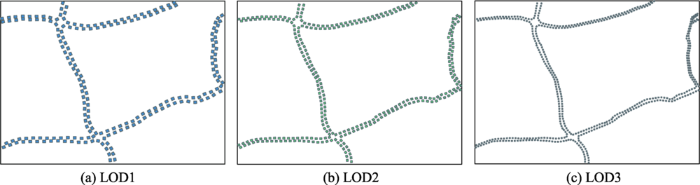
图4 真实道路模型多粒度的噪声柱投影
Fig. 4 Real roads models' multi-granular noise bars projection
三维地图作为地理场景的仿真模拟,可以从多角度、多层次展现地图及符号特征。因此,在三维地图中,由于维度的提升,在交互操作上也有相应的描述参量。Web端噪声地图如图5所示。在Web端浏览器中,通过Mapbox API接口实现动态地图的基本交互功能,如鼠标拖拽平移区域、滑轮缩放进行LOD调整、按下滑轮多方位旋转视角等[23],对显示的三维地图进行查看。噪声地图默认等级为13.5,并设一定的倾斜角度便于观察。鼠标滚动改变当前地图缩放等级,噪声符号根据前文等级与底图的对应关系完成切换,使其适合当前比例尺地图对应的粒度细节,实现多层次信息表达。默认时间比例尺为1:60,即地图上1 s相当于真实世界 1 min。动态地图具有信息载负量大、变化迅速的特点[24],为此在交互区域设有滑动条控制时间节点和调节时间比例尺功能,可根据需求进行时间点的切换和变化速率的控制。
图5
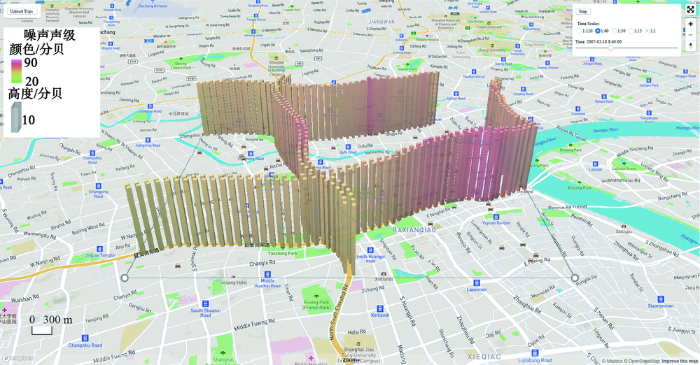
图5 Web端噪声地图
Fig. 5 Noise map on the Web
4.3 实验分析
4.3.1 整体噪声地图
噪声地图表达区域为上海黄浦区限速地带,该区域限速为80.0 km/h。代入噪声公式获得单个点声源速度为80.0 km/h时,最近噪声柱峰值声级为79.2 dB(A)左右,即在不违规情况下当前区域单声源可能产生的最大噪声级。车辆的实时速度通过GPS采样距离和时间差计算得到,再由相关公式推算出噪声声级。图6为动态地图中截取的片段,展示了同一比例尺下3个时间段内某时刻的交通噪声情况。观察发现,7:00—8:30之间,道路上出租车数量较少,车辆速度相对较快,噪声声级波动较大,噪声柱整体高度较为均衡,有车辆经过的噪声柱,在高度上具有较为明显地峰值;整体噪声柱颜色主要在黄—橙—橙红3色之间变换,以黄—橙为主。 9:00开始,出租车数量增多,道路噪声声级波动加剧,噪声柱高度相对增高;噪声柱色块橙红增多。随着时间推移,道路上车辆呈现拥挤状态,整体噪声柱高度较大,颜色趋于稳定,呈深红。
图6

图6 多时间点的局部噪声地图
Fig. 6 Local noise maps at different moments
4.3.2 多粒度噪声地图
对噪声地图动态观察时,通过鼠标定位和滑轮滚动可以查看细节位置或整体环境的噪声地图。本次实验地图的缩放等级在13.5~15.0之间,分界点设为14.0、14.5,当滑轮控制缩放等级变化到分界点,噪声符号底图自适应切换:当缩放等级增加,空间比例尺放大时,地图图面要素增多,噪声符号调整为更精细尺寸,定位和排列方式更加精准细节,适合当前道路宽度;缩放等级减小,空间比例尺随之减小,地图显示空间增大,要素精细程度降低,噪声符号切换为较粗糙模型,从而把握宏观噪声环境。图7展示了同一时间不同缩放等级对应的噪声地图,呈现了噪声信息的多粒度细节表达。
图7
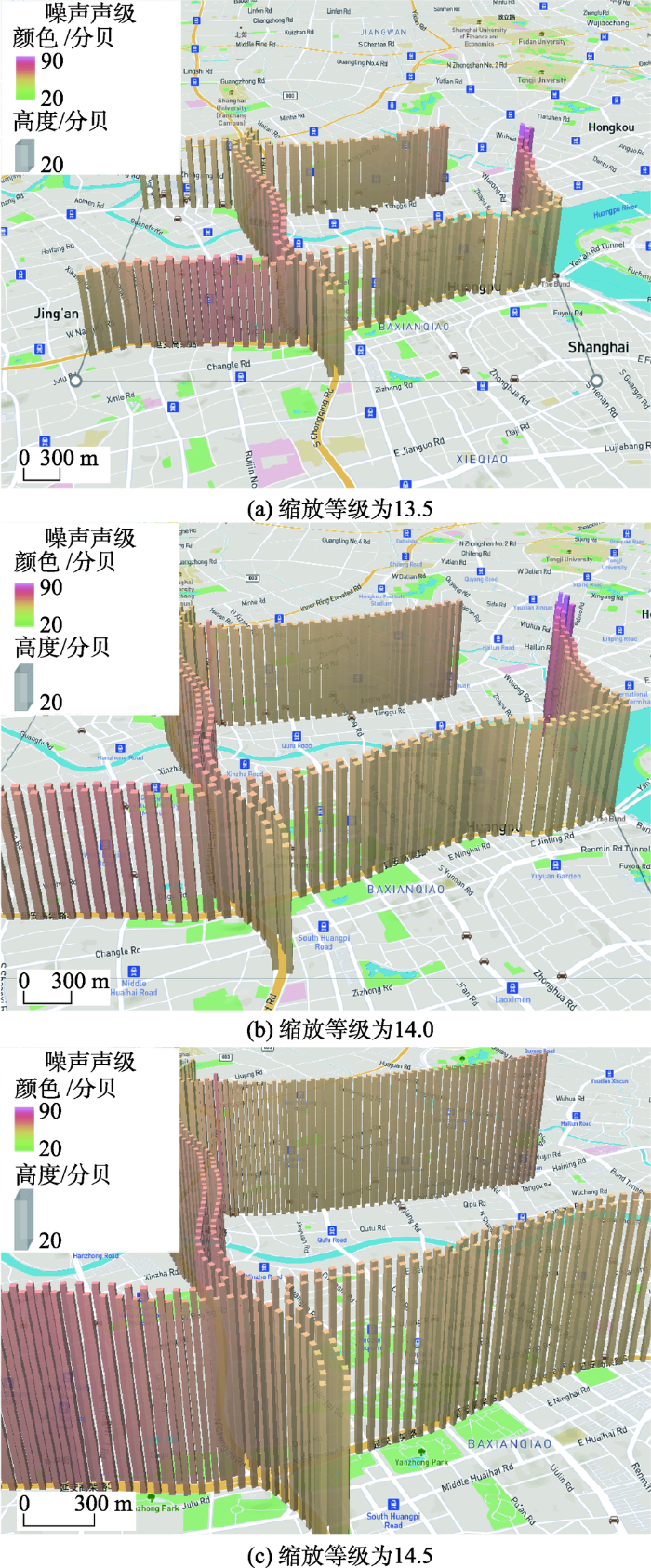
图7 多粒度的局部噪声地图
Fig. 7 Local noise maps at different map zoom levels
4.3.3 视觉变量表达
本次实验对噪声信息进行双重视觉变量表达。为展现双重变量的特点,图8展示了使用不同视觉变量表示噪声的噪声地图。只用颜色表示时,因噪声符号的扁平性和底图基础要素的丰富性,使得噪声专题要素的展现力削弱;仅用高度展示时,在三维地图的视角变化下,空间距离差较大的噪声柱高度难以进行比较,整体情况难以把握;结合使用高度和颜色时,既突出表现了单个噪声要素,从宏观上噪声值对应的颜色提供了更细节的噪声强度信息,便于比较,有利于从整体感知噪声环境。
图8
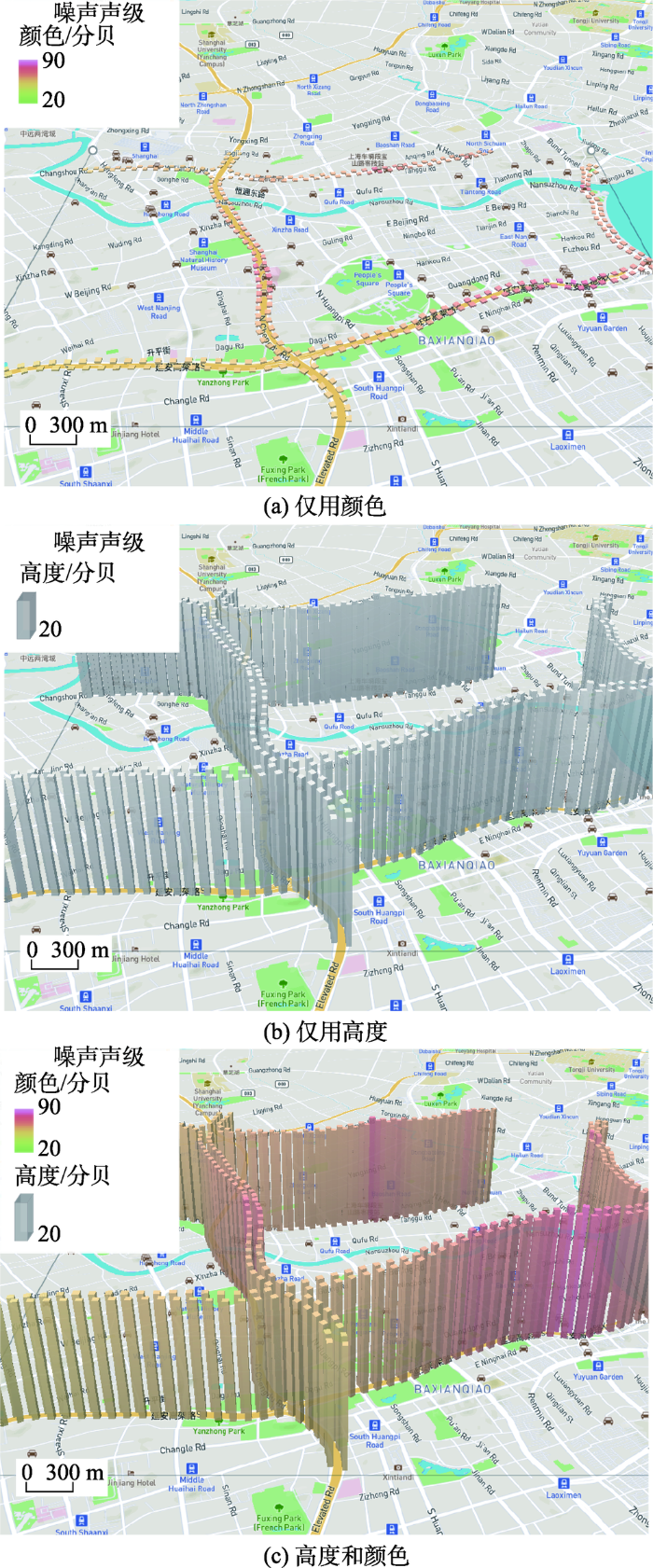
图8 同一时间、同一比例尺下使用不同视觉变量表示的局部噪声地图
Fig. 8 Local noise maps represented by different visual variables at the same time and the same map zoom level
5 结论
本文首先对噪声地图的可视化类型进行概述,并指出当前地图形式的局限和可拓展方向。随后简要介绍了交通噪声表达的物理学机理和相关理论知识。利用视觉变量中的尺寸、颜色和动态参量中变化速率、变化次序的特点,对噪声符号和位置排列进行设计。从某时刻的单点声源、同时刻的多点声源、同时刻不同粒度的单点声源对噪声传递的衰减、叠加、多粒度变化进行表达。最后结合已有理论,以交通轨迹为噪声值参考依据,对道路交通噪声进行噪声地图设计,实现Web端的三维动态可视化。主要创新点在于添加了尺寸的视觉变量,使用高度和颜色双重变量动态传达噪声信息。与传统平面噪声地图相比,使用带有颜色变化和高度可变的噪声柱,比单纯使用颜色的平面符号更能引起观图者注意;与静态地图只能显示最终结果状态相比,噪声柱的波动,使用户能够迅速感知噪声值的变化情况,跟踪噪声随车辆运动的演变过程,有助于观图者发现细微异常情况,为噪声防治提供更精准的参考信息。本文主要在地图可视化方面进行针对性研究,在后续的工作中,拟将重心放置在基于噪声地图的空间分析、热点探索、分布规律和预测趋势等方面。
