
基于双向滚动球变换的数字水深模型多尺度表达
1 引 言 数字水深模型(Digital Depth Model, DDM)是反映水深变化的数字化模型,也是用深度表达海底基本地貌特征的一种常用三维数字模型[1]。按照数据结构的不同,DDM可分为规则格网DDM和不规则格网DDM。本文所指DDM为规则格网DDM,并简称为DDM。作为海洋...
- 作者:梁 彬,应国伟,何 鑫,吴 思,陈小平来源:2014测绘学会|2014年12月28日
1 引 言
数字水深模型(Digital Depth Model, DDM)是反映水深变化的数字化模型,也是用深度表达海底基本地貌特征的一种常用三维数字模型[1]。按照数据结构的不同,DDM可分为规则格网DDM和不规则格网DDM。本文所指DDM为规则格网DDM,并简称为DDM。作为海洋地理空间信息框架的基本内容和其他各种相关信息的载体,DDM不但是保证舰船海上航行安全的主要信息源之一,而且也是进行海洋地学研究和海上工程建设、考古活动等的重要信息平台[1~2]。随着我国数字海洋等海洋环境工程建设的发展,DDM的应用领域日益扩大,从而导致了对多尺度DDM的需求。受技术制约,长期以来主要采用重复数字化的方法来建立不同尺度的DDM。这种方法耗资巨大、效率低,不但数据采集与建库工作繁重,且数据不稳定[3~6]。为解决这一问题,一些学者对如何利用同一数据源导出不同分辨率的DDM表达,以实现其尺度变换进行了研究[7~10]。由于等深线作为数字水深模型可视化表达的一种重要形式,其与DDM的多尺度表达具有相同的约束原则[1][8][11]。因而现有的DDM多尺度表达算法大都是对二维等深线图形综合算法的三维扩展。例如,Shepard M. Smith提出的基于正向滚动圆变换(Rolling Circle Transform)的等深线形状化简算法[12],可充分顾及等深线综合中的“安全性”原则,保留等深线中具有航海意义的凸部特征点,并依据阈值(缓冲距)大小对各类凹部特征点进行合理移位,实现对等深线的多尺度表达[13]。董箭、彭认灿[14]等人通过对二维正向滚动圆变换算法的维数扩展,提出DDM多尺度表达的正向滚动球变换(Rolling Ball Transform)算法,从保障舰船海上航行安全的角度实现了DDM的多尺度表达。分析表明,正向滚动圆(球)变换均是以牺牲“保真性”来换取满足舰船航行的“安全性”为原则的,且随着阈值的增大会逐步填平等深线(DDM)上的凹部(负向地貌)而使海底地貌特征无法得到保持[1][12~13]。
针对上述问题,本文在分析DDM滚动球变换原理实质的基础上,利用DDM双向滚动球变换结合尺度因子对海底地貌进行定量分析,并顾及DDM格网点水深值的统计特性,建立对于细部(骨架)地貌的判定准则。在此基础上,通过对给定尺度下的细部地貌进行DDM双向滚动球变换的等距离面提取,构建一种符合“保真性”要求的基于双向滚动球变换的DDM多尺度表达算法,可满足不同尺度DDM在航海以外各相关领域不同层次的应用需求。
2 DDM正向滚动球变换存在问题分析
参照文献[4]、[10]和[19]关于数字高程模型(DEM)多尺度表达评价标准,可以将DDM多尺度表达的主要评价标准归纳为水深值的准确性和严密有序性。此处,所谓水深值的准确性是指在一定尺度下的海底骨架地貌的水深值与原始DDM格网点水深值的误差大小;水深值的严密有序性则是指DDM格网点水深值与平面点位之间是严格的一一对应关系。
由DDM多尺度表达的评价标准可知,实现DDM多尺度表达的水深值准确性和严密有序性的关键在于有效区分DDM中骨架地貌与细部地貌。而DDM中对于骨架地貌与细部地貌的区分除了考虑海底地貌的横向分布范围(长度和宽度)外,还需进一步考虑其纵向分布高度(矢高)。DDM正向滚动球变换中尺度因子![]() 由于仅从横向分布范围对海底地貌进行了限定(负向地貌的凹部长度、宽度小于等于
由于仅从横向分布范围对海底地貌进行了限定(负向地貌的凹部长度、宽度小于等于![]() ,其中
,其中![]() 表示原始DDM格网单元大小)[1][14],无法有效区分DDM中骨架地貌与细部地貌,使得DDM中纵向分布高度不同的负向地貌由于其横向分布范围相同而进行了同样的填平处理,无法满足DDM多尺度表达中对于海底骨架地貌水深值准确性的要求。
表示原始DDM格网单元大小)[1][14],无法有效区分DDM中骨架地貌与细部地貌,使得DDM中纵向分布高度不同的负向地貌由于其横向分布范围相同而进行了同样的填平处理,无法满足DDM多尺度表达中对于海底骨架地貌水深值准确性的要求。
此外,由于海底地貌纵向分布的相对高度在一定程度上反映了DDM中海底地形的起伏形态,从而DDM中海底地形起伏形态的保持关键在于维护海底地貌纵向分布的相对高度。由于DDM正向滚动球变换的几何特性仅保留了DDM中正向地貌纵向分布的高度信息[1][14],并未顾及负向地貌特征值的保留,从而导致DDM海底地貌纵向分布的相对高度发生了变化,破坏了DDM多尺度表达中水深值严密有序性的原则。
由上述分析不难看出,DDM正向滚动球变换尽管在一定程度上解决了面向航海应用中顾及“安全性”原则的DDM多尺度表达,但同时也破坏了原始海底地貌信息。这主要是由于DDM正向滚动球变换所涉及的尺度仅从三维空间分量中的![]() 、
、![]() 轴方向对海底地貌特征进行度量,并未考虑
轴方向对海底地貌特征进行度量,并未考虑![]() 轴方向的海底地貌特征,从而导致海底地貌在
轴方向的海底地貌特征,从而导致海底地貌在![]() 轴方向存在综合尺度过大的倾向。
轴方向存在综合尺度过大的倾向。
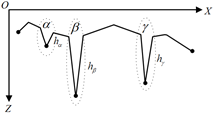
(a) 原始DDM剖面图 (b) 正向滚动球变换后一定尺度下的DDM剖面图
图1 DDM正向滚动球变换的局限性
如图1所示,(a)、(b)子图分别为原始DDM和正向滚动球变换后一定尺度下DDM沿![]() 轴方向的剖面图。
轴方向的剖面图。![]() 、
、![]() 、
、![]() 为原始DDM中相邻负向地貌,各负向地貌的横向分布范围(
为原始DDM中相邻负向地貌,各负向地貌的横向分布范围(![]() 、
、![]() 轴方向海底地貌特征描述)均等于
轴方向海底地貌特征描述)均等于![]() ;
;![]() 、
、![]() 、
、![]() 为负向地貌
为负向地貌![]() 、
、![]() 、
、![]() 的纵向分布高度(
的纵向分布高度(![]() 轴方向海底地貌特征描述),且
轴方向海底地貌特征描述),且![]() 。由DDM正向滚动球变换的尺度依赖特性可知,经由缓冲距
。由DDM正向滚动球变换的尺度依赖特性可知,经由缓冲距![]() (
(![]() 表示水深测量的中误差)的DDM正向滚动球变换
表示水深测量的中误差)的DDM正向滚动球变换![]() 后,原始DDM中正向和平坦地貌保持不变,而负向地貌
后,原始DDM中正向和平坦地貌保持不变,而负向地貌![]() 、
、![]() 、
、![]() 均被填平[1][14]。DDM正向滚动球变换的此类特性决定了其在DDM的多尺度表达中存在过度取浅的倾向,这与DDM多尺度表达中水深值的严密有序性原则是相悖的。此外,由于DDM正向滚动球变换未充分考虑负向地貌的纵向分布高度信息,无法区分原始DDM中细部地貌与骨架地貌,骨架地貌
均被填平[1][14]。DDM正向滚动球变换的此类特性决定了其在DDM的多尺度表达中存在过度取浅的倾向,这与DDM多尺度表达中水深值的严密有序性原则是相悖的。此外,由于DDM正向滚动球变换未充分考虑负向地貌的纵向分布高度信息,无法区分原始DDM中细部地貌与骨架地貌,骨架地貌![]() 、
、![]() 与细部地貌
与细部地貌![]() 不加区分地进行了相同尺度的综合处理,这也违背了DDM多尺度表达中对于水深值准确性的要求。
不加区分地进行了相同尺度的综合处理,这也违背了DDM多尺度表达中对于水深值准确性的要求。
3 DDM双向滚动球变换及多尺度表达
由于DDM正向滚动球变换中的尺度因子![]() 并未考虑
并未考虑![]() 轴方向的海底地貌特征,因而破坏了DDM格网点水深值准确性与严密有序性。因此,研究如何利用DDM滚动球变换获得DDM在
轴方向的海底地貌特征,因而破坏了DDM格网点水深值准确性与严密有序性。因此,研究如何利用DDM滚动球变换获得DDM在![]() 轴方向的海底地貌特征描述成为解决问题的关键。由文献[14]可知,DDM正向滚动球变换
轴方向的海底地貌特征描述成为解决问题的关键。由文献[14]可知,DDM正向滚动球变换![]() 具有保持正向和平坦地貌不变、缩小或填平负向地貌的几何特性,且曲面
具有保持正向和平坦地貌不变、缩小或填平负向地貌的几何特性,且曲面![]() 中包含了正向和平坦地貌特征点与缩小或填平后负向地貌特征点的水深值信息,从而DDM中负向地貌的纵向分布高度可由曲面
中包含了正向和平坦地貌特征点与缩小或填平后负向地貌特征点的水深值信息,从而DDM中负向地貌的纵向分布高度可由曲面![]() 与原始DDM在
与原始DDM在![]() 轴方向的差值来确定。即:
轴方向的差值来确定。即:
 ............................................................................(1)
............................................................................(1)
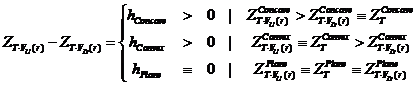
式中:![]() 表示曲面
表示曲面![]() 格网点水深值;
格网点水深值;![]() 表示原始DDM格网点水深值;
表示原始DDM格网点水深值;![]() 、
、![]() 、
、![]() 分别表示DDM中正向地貌、负向地貌、平坦地貌的纵向分布高度;
分别表示DDM中正向地貌、负向地貌、平坦地貌的纵向分布高度;![]() 、
、![]() 、
、![]() 分别表示曲面
分别表示曲面![]() 中正向地貌、负向地貌、平坦地貌的特征点水深值;
中正向地貌、负向地貌、平坦地貌的特征点水深值;![]() 、
、![]() 、
、![]() 分别表示原始DDM中正向地貌、负向地貌、平坦地貌的特征点水深值。与之相反,DDM负向滚动球变换
分别表示原始DDM中正向地貌、负向地貌、平坦地貌的特征点水深值。与之相反,DDM负向滚动球变换![]() 具有保持负向和平坦地貌,缩小或削平正向地貌的几何特性,且曲面
具有保持负向和平坦地貌,缩小或削平正向地貌的几何特性,且曲面![]() 中包含了负向和平坦地貌特征点与缩小或削平后正向地貌特征点的水深值信息[1][14],从而DDM中正向地貌的纵向分布高度可由原始DDM与曲面
中包含了负向和平坦地貌特征点与缩小或削平后正向地貌特征点的水深值信息[1][14],从而DDM中正向地貌的纵向分布高度可由原始DDM与曲面![]() 在
在![]() 轴方向的差值来确定。即:
轴方向的差值来确定。即:
 ............................................................................(2)
............................................................................(2)
式中:![]() 表示曲面
表示曲面![]() 格网点水深值;
格网点水深值;![]() 、
、![]() 、
、![]() 分别表示曲面
分别表示曲面![]() 中正向地貌、负向地貌、平坦地貌的特征点水深值。结合(1)、(2)式,本文提出DDM双向滚动球变换的概念,即通过对原始DDM分别进行正向和负向滚动球变换,得到曲面
中正向地貌、负向地貌、平坦地貌的特征点水深值。结合(1)、(2)式,本文提出DDM双向滚动球变换的概念,即通过对原始DDM分别进行正向和负向滚动球变换,得到曲面![]() 与
与![]() ,由于上述曲面分别包含了原始DDM中正向地貌与负向地貌特征点的水深值信息(
,由于上述曲面分别包含了原始DDM中正向地貌与负向地貌特征点的水深值信息(![]() 且
且![]() ),且相对于原始DDM,平坦地貌保持不变(
),且相对于原始DDM,平坦地貌保持不变(![]() ),从而DDM在
),从而DDM在![]() 轴方向的海底地貌特征描述可以由曲面
轴方向的海底地貌特征描述可以由曲面![]() 与
与![]() 在
在![]() 轴方向的差值来确定。即:
轴方向的差值来确定。即:
 ...................................................(3)
...................................................(3)

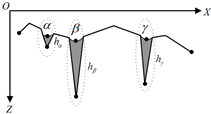
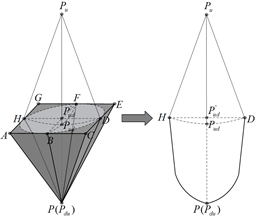
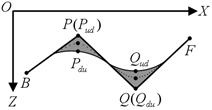
图2 DDM双向滚动圆变换原理图
如图2所示即为双向滚动球变换原理图,原始DDM经由DDM正(负)向滚动球变换得到曲面![]() (以黑色格网表示)和
(以黑色格网表示)和![]() (以白色格网表示),而海底地貌在
(以白色格网表示),而海底地貌在![]() 轴方向的海底地貌特征描述可由图2中黑色格网与白色格网在
轴方向的海底地貌特征描述可由图2中黑色格网与白色格网在![]() 轴方向的差值来实现。在此基础上,通过下文所述方法建立DDM多尺度表达中细部(骨架)地貌判定准则,即可确定出各DDM格网点的地貌特征值(用于标识骨架地貌或细部地貌)。对于DDM中骨架地貌予以保留(以绿色格网表示),以满足DDM多尺度表达的水深值准确性要求;对于DDM中细部地貌则通过对曲面
轴方向的差值来实现。在此基础上,通过下文所述方法建立DDM多尺度表达中细部(骨架)地貌判定准则,即可确定出各DDM格网点的地貌特征值(用于标识骨架地貌或细部地貌)。对于DDM中骨架地貌予以保留(以绿色格网表示),以满足DDM多尺度表达的水深值准确性要求;对于DDM中细部地貌则通过对曲面![]() 和
和![]() 进行等距离面提取(以红色格网表示),以满足DDM多尺度表达中水深值严密有序性的要求。
进行等距离面提取(以红色格网表示),以满足DDM多尺度表达中水深值严密有序性的要求。
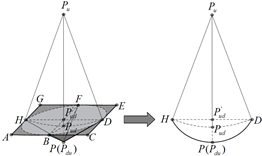
由3.1中分析可知,实现DDM多尺度表达中水深值准确性与严密有序性的关键在于有效区分DDM中细部地貌与骨架地貌,即能否在给定参数条件下,利用DDM双向滚动球变换对海底地貌进行定量分析,依据DDM格网点水深值的统计特性,建立对于细部(骨架)地貌的判定准则。为便于问题的叙述,此处以负向地貌为例。如表1所示,负向地貌分别由DDM格网单元![]() 、
、![]() 、
、![]() 和
和![]() 构成。其中:
构成。其中:![]() 为海底地貌特征点,其余格网点水深值相等;
为海底地貌特征点,其余格网点水深值相等;![]() 为滚动球球心;
为滚动球球心;![]() 、
、![]() 分别为海底地貌特征点
分别为海底地貌特征点![]() 经由DDM正(负)向滚动球变换
经由DDM正(负)向滚动球变换![]() (
(![]() )所对应的海底地貌特征点,
)所对应的海底地貌特征点,![]() 的大小可理解为海底地貌特征点
的大小可理解为海底地貌特征点![]() 处起伏程度的定量描述;
处起伏程度的定量描述;![]() 与平面
与平面![]() 相交于
相交于![]() ,
,![]() 的大小反映了负向地貌的填平程度,即海底地貌特征点
的大小反映了负向地貌的填平程度,即海底地貌特征点![]() 处起伏程度的定量描述精度。
处起伏程度的定量描述精度。
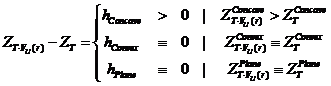
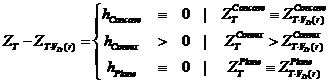
表1 DDM双向滚动球变换中细部(骨架)地貌的判定
|
地貌特征 |
DDM |
DDM剖面图 |
|
细部地貌 |
| |
|
骨架地貌 |
| |
由表1中分析不难看出:DDM双向滚动球变换的过程中,海底地貌特征点![]() 的空间位置发生了改变。在给定
的空间位置发生了改变。在给定![]() 、
、![]() 的前提下,
的前提下,![]() 的大小反映了海底地貌特征点
的大小反映了海底地貌特征点![]() 相对其周围格网点的起伏程度。令
相对其周围格网点的起伏程度。令![]() 代表DDM格网点
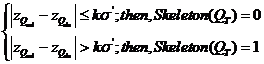
代表DDM格网点![]() 的地貌特征值(0表示细部地貌;1表示骨架地貌),在海底地形变化光滑连续、平缓的假设下,本文建立如下细部(骨架)地貌判定准则:
的地貌特征值(0表示细部地貌;1表示骨架地貌),在海底地形变化光滑连续、平缓的假设下,本文建立如下细部(骨架)地貌判定准则:
 ...............................................................................................(4)
...............................................................................................(4)
式中:![]() 表示DDM格网点
表示DDM格网点![]() 经由DDM正向滚动球变换
经由DDM正向滚动球变换![]() 后所对应的格网点;
后所对应的格网点;![]() 表示DDM格网点
表示DDM格网点![]() 经由DDM负向滚动球变换
经由DDM负向滚动球变换![]() 后所对应的格网点;
后所对应的格网点;![]() 表示DDM格网点
表示DDM格网点![]() 处海底地形的起伏程度;
处海底地形的起伏程度;![]() 表示骨架地貌判定因子;
表示骨架地貌判定因子;![]() 表示DDM内格网点起伏程度的中误差,可由下式解算获得,即:
表示DDM内格网点起伏程度的中误差,可由下式解算获得,即:
 ......................................................................................................................(5)
......................................................................................................................(5)
式中:![]() 表示DDM内格网点数目。如图1所示,经由缓冲距
表示DDM内格网点数目。如图1所示,经由缓冲距![]() 的DDM双向滚动球变换后,其任意DDM格网点
的DDM双向滚动球变换后,其任意DDM格网点![]() 的海底地形起伏程度(负向地貌
的海底地形起伏程度(负向地貌![]() 、
、![]() 、
、![]() 的纵向分布高度
的纵向分布高度![]() 、
、![]() 、
、![]() )可由
)可由![]() 、
、![]() 的差值绝对值
的差值绝对值![]() 确定。根据“小概率事件”判定法则,从统计意义上讲,当DDM格网点
确定。根据“小概率事件”判定法则,从统计意义上讲,当DDM格网点![]() 处海底地形的起伏程度大于2或3倍
处海底地形的起伏程度大于2或3倍![]() 时,可认为是小概率事件[3][8]。故骨架地貌判定因子
时,可认为是小概率事件[3][8]。故骨架地貌判定因子![]() =2或3。
=2或3。
为了最大限度减小因DDM尺度变换引起的海底地貌失真,要求在DDM多尺度变换过程中,所用方法、概念不能破坏原始DDM水深值的严密有序性,借鉴文献[19]定义它为DDM多尺度表达的水深序同构问题。即:对于序集![]() 到序集
到序集![]() 上的映射
上的映射![]() :
:![]() ,若
,若![]() ,则必有
,则必有![]() ,则称为序集的同态或序同态,且当
,则称为序集的同态或序同态,且当![]() 是一一对应,而
是一一对应,而![]() 也是
也是![]() 到
到![]() 上的同态时,则
上的同态时,则![]() 称为同构或序同构。
称为同构或序同构。
对于任意DDM格网点![]() ,依据DDM多尺度表达中细部(骨架)地貌判定准则,标记DDM格网点
,依据DDM多尺度表达中细部(骨架)地貌判定准则,标记DDM格网点![]() 的地貌特征值
的地貌特征值![]() 。若
。若![]() ,则保留该地貌特征点,以满足DDM多尺度表达中水深值准确性的要求;若
,则保留该地貌特征点,以满足DDM多尺度表达中水深值准确性的要求;若![]() ,则对原始DDM经双向滚动球变换后所得到的曲面
,则对原始DDM经双向滚动球变换后所得到的曲面![]() 、
、![]() 进行等距离面提取,以得到顾及水深序同构原则的DDM。即:
进行等距离面提取,以得到顾及水深序同构原则的DDM。即:
![]() ...................................................................................................................................................................................(6)
...................................................................................................................................................................................(6)
式中:![]() 表示等距离面变换;
表示等距离面变换;![]() 表示曲面
表示曲面![]() 、
、![]() 的等距离面;
的等距离面;![]() 表示等距离面
表示等距离面![]() 上任意格网点。参照文献[1]和[14],曲面
上任意格网点。参照文献[1]和[14],曲面![]() 、
、![]() 均为单值曲面。在原始DDM格网点
均为单值曲面。在原始DDM格网点![]() 数量足够大的前提下,等距离面
数量足够大的前提下,等距离面![]() 的解算可近似简化为[15][20]:
的解算可近似简化为[15][20]:
![]() ...........................................................(7)
...........................................................(7)

(a) 原始DDM剖面图 (b) 双向滚动球变换后一定尺度下的DDM剖面图
图3 双向滚动球变换的水深序同构特性
如图3所示,(a)、(b)子图分别为原始DDM和双向滚动球变换后一定尺度下DDM沿![]() 轴方向的剖面图。
轴方向的剖面图。![]() 、
、![]() 为原始DDM中相邻地貌特征点,且
为原始DDM中相邻地貌特征点,且![]() 。在阈值(缓冲距
。在阈值(缓冲距![]() )满足
)满足![]() (
(![]() 表示任意小的正数)的前提下,经由DDM正向滚动球变换
表示任意小的正数)的前提下,经由DDM正向滚动球变换![]() 后,地貌特征点
后,地貌特征点![]() 、
、![]() 的坐标值之间满足
的坐标值之间满足![]() ,经由DDM负向滚动球变换
,经由DDM负向滚动球变换![]() 后,地貌特征点
后,地貌特征点![]() 、
、![]() 的坐标值之间满足
的坐标值之间满足![]() ,从而
,从而![]() 。反之,若
。反之,若![]() 。依据DDM正(负)向滚动球变换
。依据DDM正(负)向滚动球变换![]() (
(![]() )的几何特性,则
)的几何特性,则![]() 且
且![]() ,即
,即![]() 。从而
。从而![]() 为同构或序同构,也即满足DDM多尺度表达中水深值严密有序性要求。
为同构或序同构,也即满足DDM多尺度表达中水深值严密有序性要求。
4 实验结果与分析
为验证算法的正确性和有效性,本文借助于文献[20]提出的单值曲面缓冲体边界生成算法的构建原理,通过VC++编程实现了基于双向滚动球变换的DDM多尺度表达算法,并利用Surfer8.0软件对生成的实验结果进行了可视化显示与分析。实验采用的数据为我国东海某海区的格网DDM数据,极限误差为1m。格网DDM大小为![]() ,初始分辨率
,初始分辨率![]() 为45m,骨架地貌判定因子
为45m,骨架地貌判定因子![]() 为2。
为2。
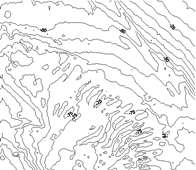
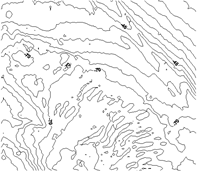

(a) 原始数据等深线图 (b) 尺度因子![]() 等深线图 (c) 尺度因子
等深线图 (c) 尺度因子![]() 等深线图
等深线图
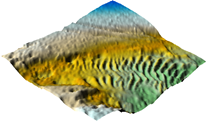
图4 原始数据与两种不同尺度下数据的等深线比较
(a) 原始数据海底地形表面 (b) 尺度因子![]() 海底地形表面 (c) 尺度因子
海底地形表面 (c) 尺度因子![]() 海底地形表面
海底地形表面
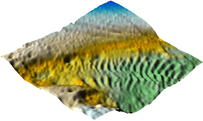
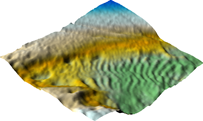
图5 原始数据与两种不同尺度下数据的海底地形表面图比较
实验共分五组,分别针对不同的尺度因子应用DDM双向滚动球变换对原始DDM进行了多尺度表达。如图4、图5所示分别为原始DDM数据与不同尺度因子(![]() 和
和![]() )影响下的等深线(等深距为5m)及海底地形表面对比图。从图中不难看出,DDM双向滚动球变换能较好地区分出反映海底地形特征的基本骨架地貌数据以及相对应的细部地貌数据,且随着尺度因子的增大,细部地貌数据呈现逐渐减少直至滤除的趋势,而基本骨架地貌数据则得以保留。借助Surfer8.0软件的坡度分析功能,本文对五组实验结果进行了量化分析,实验结论见表2。
)影响下的等深线(等深距为5m)及海底地形表面对比图。从图中不难看出,DDM双向滚动球变换能较好地区分出反映海底地形特征的基本骨架地貌数据以及相对应的细部地貌数据,且随着尺度因子的增大,细部地貌数据呈现逐渐减少直至滤除的趋势,而基本骨架地貌数据则得以保留。借助Surfer8.0软件的坡度分析功能,本文对五组实验结果进行了量化分析,实验结论见表2。
表2 多尺度表达实验数据统计
|
统计参数 |
原始DDM |
尺度因子 | ||||
|
|
|
|
|
| ||
|
水深极大值 |
-13.528 |
-13.593 |
-13.651 |
-13.756 |
-13.924 |
-14.186 |
|
水深极小值 |
-94.925 |
-94.553 |
-93.957 |
-93.358 |
-92.607 |
-91.213 |
|
水深均值 |
-61.447 |
-61.446 |
-61.444 |
-61.442 |
-61.441 |
-61.439 |
|
坡度范围 |
0~10.304 |
0~10.052 |
0~9.815 |
0~9.506 |
0~9.362 |
0~8.989 |
|
坡度均值 |
1.914 |
1.905 |
1.881 |
1.856 |
1.793 |
1.764 |
注:![]() 时表示原始DDM中的2×2个格网单元变为当前DDM中的1个格网单元,
时表示原始DDM中的2×2个格网单元变为当前DDM中的1个格网单元,![]() 时表示原始DDM中的4×4个格网单元变为当前DDM中的1个格网单元,以此类推。
时表示原始DDM中的4×4个格网单元变为当前DDM中的1个格网单元,以此类推。
实验结果表明:1)DDM双向滚动球变换能基本保持原始数据的特性,山脊与山谷的骨架地貌没有发生大的变化,仅局部细部地貌被适当地进行了平滑;2)随着尺度因子的增大,水深极大值呈现逐渐减小的趋势、水深极小值呈现逐渐增大的趋势,说明双向滚动球变换具有减少或滤除DDM中的细部地貌数据的特性;3)水深均值相对于原始DDM基本保持不变,说明DDM双向滚动球变换具有保持原始DDM中基本骨架地貌数据的特性;4)坡度的变化表现为在一定范围内的震荡,但坡度的范围呈现出逐渐减小的变化。结合坡度均值的变化可以发现,不同尺度间变化较大的是相邻尺度间的细部地貌特征点,随着尺度的减小和数据压缩量的增大,DDM整体则呈现逐步平缓的变化趋势,这与DDM多尺度表达的原则是相吻合的。
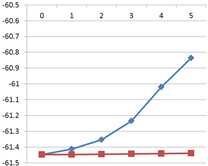
此外,为进一步验证基于双向滚动球变换的DDM多尺度表达算法在保留骨架地貌综合细部地貌方面的优势,利用本文算法与文献[14]中提出的DDM多尺度表达的正向滚动球变换算法进行对比实验。实验结论见图6(图中红色、蓝色折线分别为经本文算法与文献[14]算法获得的数据统计结果;横轴的含义为尺度因子,当尺度因子为0时,表示原始DDM)。


(a) 水深极大值 (b) 水深极小值
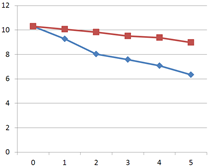
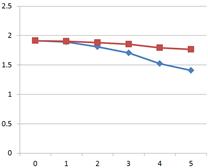
(c) 水深均值 (d) 坡度范围 (e) 坡度均值
图6 对比实验数据统计
对比实验表明:文献[14]算法的水深极大值相对于原始DDM保持不变,而水深极小值相对于本文算法以及原始DDM变化较大,这主要是由于文献[14]算法所采用DDM正向滚动球变换所具有的几何特性决定的,同时也证明了DDM正向滚动球变换以牺牲“保真性”来换取满足舰船航行的“安全性”为原则的。经由本文算法处理后的DDM水深均值相对于原始DDM基本保持不变,说明DDM双向滚动球变换相对于文献[14]算法在保持DDM骨架地貌数据方面具有一定的优势。此外,两类算法处理后的海底地形表面坡度均呈现在一定范围内的震荡,且坡度的范围从总体上呈现出逐渐减小的变化,这说明海底地形表面呈现逐步平缓的变化趋势,这与DDM多尺度表达的原则是相吻合的。但相对于文献[14]算法,本文算法的坡度范围与坡度均值变化明显较弱,说明DDM双向滚动球变换可较好地保持原始DDM的水深值严密有序性,也即符合DDM多尺度表达的“保真性”要求。
5 结束语
实现空间数据的多尺度表达的核心是建立满足一定条件的抽象模型,多个尺度空间数据集间的变换应该是尺度依赖的,且应满足水深值准确性与严密有序性的要求。本文从DDM滚动球变换的构建原理出发,利用DDM双向滚动球变换对于海底地貌的定量分析特性,建立DDM细部(骨架)地貌的判定准则,通过保留骨架地貌综合细部地貌以满足DDM多尺度表达的“保真性”要求。实验结果表明该算法可有效保留DDM中骨架地貌并综合细部地貌,实现顾及“保真性”原则的DDM多尺度表达。但需要指出的是,算法解算过程中,所涉及的骨架地貌判定因子由于采用的是经验参数,理论性和通用性有待加强,需进一步研究如何根据实际DDM格网点水深分布情况进行自适应估计的问题。另外,考虑到原始DDM数据量规模较大,还必须研究算法的优化问题。
参考文献
[1] 董 箭. 格网水深插值优化及滚动球变换处理方法研究[D]. 大连: 海军大连舰艇学院, 2013.
[2] 胡金星, 马照亭, 吴焕萍, 等. 基于格网划分的海量数据Delaunay三角剖分[J]. 测绘学报, 2004, 33 (2): 163-167.
[3] 刘 春, 王家林, 刘大杰. 多尺度小波分析用于DEM网格数据综合[J]. 中国图象图形学报, 2004, 9(3): 340-344.
[4] 艾廷华, 成建国. 对空间数据多尺度表达有关问题的思考. 武汉大学学报(信息科学版), 2005, 30(5): 377-382.
[5] 费立凡, 何 津, 马晨燕, 等. 3维Dauglas-Peucker算法及其在DEM自动综合中的应用研究[J]. 测绘学报, 2006, 35(8): 278-284.
[6] 万 刚, 朱长青. 多进制小波及其在DEM数据有损压缩中的应用[J]. 测绘学报, 1999, 28(1): 36-40.
[7] 杨族桥, 郭庆胜, 牛冀平, 等. DEM多尺度表达与地形结构线提取研究[J]. 测绘学报, 2005, 34(2): 134-137.
[8] 陈 轶. 数字水深模型的构建及多尺度表达研究. 大连: 海军大连舰艇学院, 2011.
[9] 吴 凡, 祝国瑞. 基于小波分析的地貌多尺度表达与自动综合[J]. 武汉大学学报(信息科学版), 2001, 26(2): 170-176.
[10] 胡 鹏, 高 俊. 数字高程模型的数字综合原理研究[J]. 武汉大学学报(信息科学版), 2009, 34(8): 940-942.
[11] A.H.J.CHRISTENSEN. Two Experiments on Stream Network Generalization[A]. Proceedings of the 21st International Cartographic Conference[C]. Durban: [s. n.], 2003.
[12] SHEPARD M. SMITH. The Navigation Surface: A Multipurpose Bathymetric Database[D]. Durham: New Hampshire: University of New Hampshire, 2003.
[13] 高王军. 双向缓冲区模型在海图自动制图综合中的应用研究[D]. 大连: 海军大连舰艇学院, 2009.
[14] 董 箭, 彭认灿, 张立华, 等. 滚动球变换的数字水深模型多尺度表达[J]. 地球信息科学学报, 2012, 14(6): 704-711.
[15] A.H.J.CHRISTENSEN. Cartographic Line Generalization with Waterlines and Medial-Axes[J]. Cartography and Geographic Information Science, 1999, 26(1): 19-32.
[16] 胡鹏, 耿协鹏, 曹 枫. 图形的形态变换和地图代数凸壳算法[J]. 武汉大学学报(信息科学版), 2005, 30(11): 1003-1007.
[17] 郭仁忠. 空间分析[M]. 武汉: 武汉测绘科技大学出版社, 2000.
[18] 刘雁春, 肖付民, 暴景阳, 等. 海道测量学概论[M]. 北京: 测绘出版社, 2006.
[19] 胡 鹏, 白轶多, 胡 海. 数字高程模型生成中的高程序同构[J]. 武汉大学学报(信息科学版), 2009, 34(3): 352-357.
[20] 董 箭, 彭认灿, 郑义东, 等. 基于滚动球变换的单值曲面缓冲体边界生成算法[J]. 计算机辅助设计与图形学学报, 2013, 25(7): 996-1004.
上一篇:海洋潮汐基准的量级分析与精度估算
下一篇:基于卫星高度计的冰川物质平衡测量
