
非量测型数字相机畸变纠正实验
1 光学畸变原理 由于受到光学系统加工和装配工艺限制,镜头在实际制作完成后无法完美达到设计要求,不可避免的存在像差、角放大率的变化;有效光阑位置的变化;光瞳中心与主点不重合以及透镜间的偏心等问题。这就导致整个光学系统存在畸变性和不对称性,...
- 作者:曹宗伟,邹勇平,杜沛远来源:2014测绘学|2015年02月28日
由于受到光学系统加工和装配工艺限制,镜头在实际制作完成后无法完美达到设计要求,不可避免的存在像差、角放大率的变化;有效光阑位置的变化;光瞳中心与主点不重合以及透镜间的偏心等问题。这就导致整个光学系统存在畸变性和不对称性,从而形成了镜头的畸变【1】。根据畸变差产生的原因,物镜的畸变分为对称径向畸变和非对称畸变两类,非对称畸变包括偏心畸变和像平面畸变。
1.1 对称径向畸变
对称径向畸变差是由于物镜的残余像差引起的像点沿径向产生的偏差【1】。这种畸变是对称的,但对称中心与主点并不完全重合,但在研究时通常将主点视为对称中心。径向畸变有正有负,相对主点向外偏移为正,称为枕形畸变;向内偏移为负,称为桶形畸变(如图1所示)。


枕形畸变 桶形畸变
径向畸变一般可用下述奇次多项式表示【2】:
![]() (1)
(1)
将其分解到像平面坐标系的![]() 轴和
轴和![]() 轴上,则有:
轴上,则有:
 (2)
(2)
式中:![]() ,
,![]() ,
,![]() 。其中
。其中![]() 为径向畸变系数。
为径向畸变系数。
1.2 非对称畸变
作为非对称畸变的典型代表,偏心畸变主要是由光学系统光心与几何中心不一致造成的,即镜头器件的光学中心不能严格共线,偏心畸变使像点既产生径向偏差又产生切向偏差,表达式如下:
![]() (3)
(3)
将其分解到像平面坐标系的x轴和y轴上,则有:
![]() (4)
(4)
式中p1、p2为偏心畸变系数,偏心畸变在数量上要比径向畸变小的多。
像平面畸变可以分为像平面不平引起的畸变和像平面内的平面畸变两类,二者都包含了透镜误差,其表达式为:
 (5)
(5)
式中![]() 为像平面内畸变系数。传感器镜头主点坐标
为像平面内畸变系数。传感器镜头主点坐标![]() 的偏移,该偏移量在
的偏移,该偏移量在![]() ,
,![]() 方向上的偏移量用常量
方向上的偏移量用常量![]() 表示,同时,设传感器焦距的变化量为
表示,同时,设传感器焦距的变化量为![]() ,该变化量在像点上的影响可以模拟为:
,该变化量在像点上的影响可以模拟为:
2常用相机畸变纠正模型
2.1 10参数模型
10参数模型中每一个畸变参数都具有明确的物理含义,如镜头形状不规则引起的径向畸变、镜头器件光学中心不共线引起的偏心畸变等。摄影物镜的畸变差包括对称径向畸变、偏心畸变和像平面畸变。10参数数学模型公式表达如下。
 (7)
(7)
式中,k1、k2、k3为径向畸变系数,p1、p2为偏心畸变系数,b1、b2为像平面畸变系数。基于10参数的相机校准方法可以较好的改正相机的大多数系统误差,近年来得到摄影测量界的普遍接受。根据附加参数光束法平差得到的系统畸变系数,采用间接纠正的方法,逐点纠正系统畸变差,生成纠正了系统畸变的影像。
如果不存在随机畸变,影像上的空间直线经纠正后应是一条直线。分别对纠正影像上的垂直直线或者水平直线的边界点作直线拟合,那么存在随机畸变的边界点将围绕一条理想直线作不规则的波动。每个像点的系统畸变和随机畸变之和就是该像点的总畸变。最后采用间接纠正的方法,根据每个像点的总畸变对影像进行逐点纠正,纠正公式见公式(8)。
 (8)
(8)
据有关文献介绍【3】,k3和p2这两个参数对畸变纠正影响较小,可以忽略。
目前针对10参数模型的研究相对比较成熟,该模型是根据相机成像过程中各种物理因素的影响而抽象得到的一种数学模型,可以很好地反映相机成像过程中的系统误差,而且模型算法容易实现,参数解算精度较高,适合高精度的航空摄影测量任务和近景摄影测量任务,是摄影测量领域应用最为广泛的相机畸变模型【3】。
2.2一般多项式模型
一般多项式模型采用关于像点坐标(x,y)的二元![]() 次多项式。一般多项式模型如下式所示:
次多项式。一般多项式模型如下式所示:
 (9)
(9)
式中,(![]() ,
,![]() )为像点坐标畸变,(x,y)为像点坐标,
)为像点坐标畸变,(x,y)为像点坐标,![]()
![]() …为像点畸变系数。
…为像点畸变系数。
该模型把像点畸变的综合影响看作是一个整体,而不去解释畸变的各种误差来源,单个参数的物理意义不明显。在航空摄影测量中该模型是像点系统误差的经典模型,但是近年来仅作为一种模型出现,实际较少采用。
2.3有限元模型
有限元方法最初应用于结构分析,目前在测绘领域也已有广泛的应用,如数字地面模型(DTM)、变形检测与分析以及相机检校等。有限元方法模型可以拟合出由于焦平面不平产生的系统性误差,而这种误差在通常情况下很难利用参数模型来拟合。利用有限元方法校准相机主要有两种方式:补偿主距变化和直接补偿像点畸变。
补偿主距变化的方法主要针对径向畸变和像平面不平畸变,其基本原理是将畸变视为由各像点处的主距值变化引起。另一种有限元模型是直接补偿各像点畸变。该方法主要是将像平面等分为若干单元,每个节点![]()
![]() 具有两个方向的畸变差
具有两个方向的畸变差![]()
![]() 和
和![]()
![]() ,用以表示该位置处的像点坐标畸变值。像平面内任一位置处的畸变可利用其所在单元的4个节点经双线性内插得到。在计算各节点处畸变时,为保证畸变的连续性,通常需加入连续性约束条件,另外,由于畸变改正值与相机内、外参数间存在强相关性,还需加入一些附加约束条件,例如,将主距和主点坐标视为带权观测值、将主点处畸变赋为0等。
,用以表示该位置处的像点坐标畸变值。像平面内任一位置处的畸变可利用其所在单元的4个节点经双线性内插得到。在计算各节点处畸变时,为保证畸变的连续性,通常需加入连续性约束条件,另外,由于畸变改正值与相机内、外参数间存在强相关性,还需加入一些附加约束条件,例如,将主距和主点坐标视为带权观测值、将主点处畸变赋为0等。
为对各模型的纠正精度进行评价,利用我实验室基于精密测角法的数字相机校准装置(见图2),对某佳能5D MarkⅡ数字相机进行了参数校准和畸变纠正实验验证。该相机内方位元素计算结果为:主距f=51.538mm,主点坐标为(0.041mm,0.013mm)。
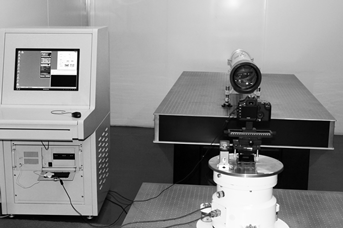
图2 基于精密测角法的数字相机校准装置
数字相机校准装置从航测相机的校准需求出发,在分析论证数字相机实验室校准要求的基础上,融合了精密机械、自动控制和图像处理技术,提出了基于误差传递的总体精度匹配与质量控制方法。研究提出了可变参数的椭圆拟合目标图像定位算法,创新性引入角度参数,使测量靶标定位精度达到了1/25像素(约0.3μm),有效保证了测量精度。提出的开环系统转台测量误差纠正方法,保证了转台的高精度测量。在数字相机校准领域应用前景广阔。
畸变纠正的基本要求是建立的数学模型并尽量逼近实际测量的结果,逼近的程度可以用一种偏差的平方和表示。假定通过相机校准过程测量得到的畸变为![]() 和
和![]() ,而通过畸变数学模型拟合公式计算得到的畸变为
,而通过畸变数学模型拟合公式计算得到的畸变为![]() 和
和![]() ,计
,计![]() ,则畸变纠正精度的评价量可以表示为
,则畸变纠正精度的评价量可以表示为![]() 。这样,数字相机的畸变纠正过程中,求取各畸变模型公式的参数,就是一个优化计算的过程,优化的目标是使s最小,也就是要求数学模型与实际测量结果最接近。在数字图像的后处理时,用这些几何标定得到的参数,重新计算和修正每个象素的坐标,以便获得地面图像的高精度几何位置数据。
。这样,数字相机的畸变纠正过程中,求取各畸变模型公式的参数,就是一个优化计算的过程,优化的目标是使s最小,也就是要求数学模型与实际测量结果最接近。在数字图像的后处理时,用这些几何标定得到的参数,重新计算和修正每个象素的坐标,以便获得地面图像的高精度几何位置数据。
3.1十参数模型畸变纠正实验
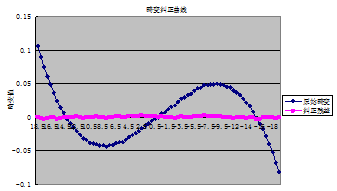
10参数畸变模型参数解算结果为: k1=4.36×10-5,k2=3.95×10-8,k3=-8.7×10-11,p1=1.52×10-5,p2=2.66×10-5,b1=-8.6×10-3,b2=-6.43×10-3。
利用k1、k2 、k3参数进行数字相机畸变纠正结果为:![]() mm,利用k1、k2 、k3、p1、p2、b1、b2参数进行数字相机畸变纠正结果为
mm,利用k1、k2 、k3、p1、p2、b1、b2参数进行数字相机畸变纠正结果为![]() mm。由实验结果可知,只考虑径向畸变纠正情况下,畸变纠正残差为9.9mm,约1.5像元,纠正精度较低,而考虑了p1、p2、 b1、b2参数畸变纠正后,畸变纠正精度为1.30mm,约为0.2像元,畸变纠正精度大幅度提高。实验结果表明非量测型数字相机的偏心畸变和像平面畸变较大,在畸变纠正时不可忽略。
mm。由实验结果可知,只考虑径向畸变纠正情况下,畸变纠正残差为9.9mm,约1.5像元,纠正精度较低,而考虑了p1、p2、 b1、b2参数畸变纠正后,畸变纠正精度为1.30mm,约为0.2像元,畸变纠正精度大幅度提高。实验结果表明非量测型数字相机的偏心畸变和像平面畸变较大,在畸变纠正时不可忽略。
10参数畸变纠正曲线见图3。
3.2 多项式模型畸变纠正实验
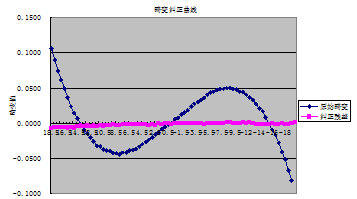
多项式模型解算的结果为: a=0.000947,b=-5.82E-05,c=1.042E-06,d=-7.16E-09,e=1.67E-11。
利用10参数进行数字相机畸变纠正残差为![]() mm,畸变纠正曲线见图4。
mm,畸变纠正曲线见图4。
3.3 有限元法畸变纠正实验
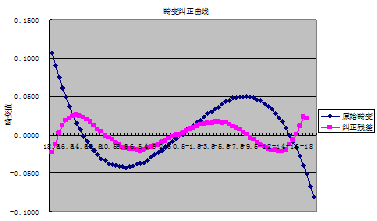
本文采用补偿主距变化的有限元方法进行相机畸变纠正,即将畸变视为由各采样点处的主距值变化引起,则![]() ,
,![]() 为第i个采样点对应网格板中心的角度,
为第i个采样点对应网格板中心的角度,![]() 为第i个采样点的径向畸变差。利用有限元法进行畸变纠正结果为s=14.8mm。畸变纠正曲线见图5。
为第i个采样点的径向畸变差。利用有限元法进行畸变纠正结果为s=14.8mm。畸变纠正曲线见图5。
4 结果分析
对本文的实验结果分析可以得出以下几点结论:⑴利用k1、k2 、k3、p1、p2、 b1、b2参数进行相机畸变纠正精度远高于仅考虑径向畸变参数进行相机畸变纠正的精度,即非量测型数字相机的偏心畸变和像平面畸变参数在畸变纠正时不可忽略;⑵10参数模型畸变纠正精度略高于多项式模型畸变纠正精度,10参数模型和多项式模型畸变纠正精度均远高于有限元模型。
中华人民共和国测绘行业标准《数字航摄仪检定规程》(CH/T 8021-2010)对畸变测量精度的要求为:畸变纠正残差小于1/3像元。本文实验用的相机为佳能5D MarkⅡ数字相机,其像元为6.4mm,1/3像元约为2.13mm。由本文实验畸变纠正结果可知,10参数模型和多项式模型的畸变纠正残差分别为1.30mm和1.36mm,均满足CH/T 8021-2010的要求,而有限元模型的畸变纠正残差为14.8mm,超出了CH/T 8021-2010要求。因此,本文建议非量测型相机畸变模型采用10参数模型或多项式模型进行畸变纠正。
参考文献:
[1]黄静,高晓东等.照相物镜径向畸变模型的再商讨.光学学报,2008(10):1930-1933.
[2]金仲华,崔红霞.数字相机径向畸变差检测及改正[J].科技广场,2008(10):118-120.
[3]黄静,高晓东等.大面阵数字航测相机的精密几何标定.光电工程,2006,133(2):138-140.
[4]邹勇平,缪剑.数字航测相机的实验室检定与摄影检校.测绘通报,2010(2):4-6.
[5] CH/T 8021-2010.数字航摄仪检定规程[S].
上一篇:信息化航测生产技术体系构建探讨
