
平面和高程控制分离的卫星影像立体平差研究
1 引言 随着经济的发展,三维地理信息已经在数字地球、城市规划、环境保护等各方面得到广泛应用。而遥感卫星技术的快速发展,使航天摄影测量已经成为继航空摄影测量后又一个快速获取三维地理信息的手段,特别是近年来随着三线阵立体相机等技术的发展,三...
- 作者:李国元,唐新明,王华斌,张重阳来源:2014测绘学|2015年03月01日
1 引言
随着经济的发展,三维地理信息已经在数字地球、城市规划、环境保护等各方面得到广泛应用。而遥感卫星技术的快速发展,使航天摄影测量已经成为继航空摄影测量后又一个快速获取三维地理信息的手段,特别是近年来随着三线阵立体相机等技术的发展,三维遥感信息的获取技术取得了长足的进步[1,2,3]。
由于光学立体成像方式以及卫星姿态测量精度等因素的制约,所以完全无地面控制条件的高精度立体测图还无法实现[4,5,6]。例如,即使分辨率优于0.5米的WorldView卫星在无地面控制点条件下地面点高程精度能达到3-4米[7],也还无法满足与其分辨率相对应的1:10000比例尺地形图的要求,仍然需要一定数量的地面控制点辅助以提高三维测量精度。地面控制点一般分为:平高控制点、平面控制点和高程控制点。对于航空摄影测量,地面控制精度、数量和分布要求,已经有比较成熟的行业标准规范[8,9],但对于航天摄影测量则缺乏相应的规范说明。
Teo等[10]曾提出一种DEM辅助的弱交会条件下影像平面区域网平差方法,所用到的控制数据仅有平面控制点。唐新明[11]等利用有理函数模型对资源三号卫星影像进行立体平差取得了平面3.2米、高程1.8米的结果,但其采用的四角布野外平高控制点的方案。汪韬阳[12]等对资源三号的平面区域网和立体区域网平差做了比较分析,但对单纯的高程控制没有涉及。Srivastava[13]采用稀疏的平高控制点对印度的Cartosat-1卫星影像进行条带平差处理。李国元[14]曾尝试将国外GLAS激光测高数据作为高程控制用于资源三号高精度立体测图研究,取得了可行的结果。
国家测绘地理信息局卫星测绘应用中心经过多年的努力,率先建设完成了我国首个国家级的高精度控制点数据库。该数据库主要以历史正射影像图为基础,具有较高平面控制精度,但高程控制数据不足或精度不能满足高精度立体测图需求[15]。卫星激光测高技术的发展,激光测高精度可达亚米级甚至分米级,为航天摄影测量提供了一种有效的高程控制数据源。因此开展平面和高程控制分离的卫星影像立体平差研究非常必要,对于促进未来激光测高数据与光学立体影像的高精度集成,提升全球三维地理信息获取能力也具有非常重要的意义。
本文提出了一种针对卫星立体影像的平面和高程控制分离的平差方法,该方法基于有理函数模型,对平面控制和高程控制数据进行分离和统一,以适应立体影像平差对不同控制源的支持,同时采用Ikonos和资源三号卫星影像开展实验,结果验证了该方法对单景和区域网立体影像平差的适应性,为后续开展激光测高和光学卫星影像集成提供参考。
2 实验方法
目前高分辨率卫星影像一般都采用有理函数模型(Rational Function Model,简称RFM),RFM模型是将像点坐标![]() 表示为以相应地面点空间坐标
表示为以相应地面点空间坐标![]() (其中
(其中![]() 为经度,
为经度,![]() 为纬度,
为纬度,![]() 为高程)为自变量的多项式的比值:
为高程)为自变量的多项式的比值:
 (1)
(1)
其中![]() 为标准化的地面坐标,
为标准化的地面坐标,![]() 为标准化的影像坐标。在有控制点的情况下, 一般采用平移、平移+旋转、仿射变换等像方补偿的方式对有理函数模型进行修正,即
为标准化的影像坐标。在有控制点的情况下, 一般采用平移、平移+旋转、仿射变换等像方补偿的方式对有理函数模型进行修正,即
 (2)
(2)
其中(![]() ,
,![]() )表示像方补偿数值,若采用平移和一次仿射变换,其表达形式分别为(3)和(4),
)表示像方补偿数值,若采用平移和一次仿射变换,其表达形式分别为(3)和(4),
![]() (3)
(3)
![]() (4)
(4)
按Tailor公式对式(2)按(4)式仿射变换的补偿形式展开至一次项:
 (5)
(5)
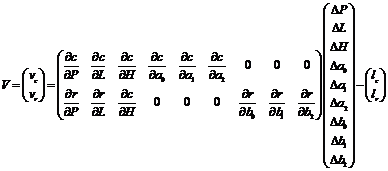 (6)
(6)
同时根据平面控制和高程控制物方坐标改正数应近似于0,可列出虚拟观测方程:Cxy=0 或Cz=0。当高程或平面控制数据少于2个时,应采用式(3)平移补偿模型列误差方程式。
对于![]() 有
有![]() ,其中P为观测值的权值矩阵。
,其中P为观测值的权值矩阵。
3 实验与分析
3.1 实验数据说明
文章选取了Ikonos-2和ZY-3两种卫星在澳大利亚Hobart地区、山西太原、陕西渭南共三个区域的立体影像开展实验。其中Hobart地区采用的是Ikonos-2单景立体影像,太原和渭南地区分别采用了ZY-3单景和区域多景立体影像。
澳大利亚Hobart地区的Ikonos-2立体影像获取时间为2003年2月,影像分辨率为1m,由国际摄影测量与遥感协会ISRPS网站上免费提供,其中控制点数据由墨尔本大学通过野外GPS实地测量获得,高程精度优于0.15m,共选取了21个控制点。
太原地区实验范围为:37.5448°--38.4856°N,112.3624°--112.9165°E,实验数据为2012年10月31日拍摄到的资源三号三线阵影像,其中平面控制数据来源于0.5m分辨率的DOM影像,高程控制数据来源于2009年10月的GLAS数据14级产品,高程检查数据为该地区3米格网的机载LIDAR数据,精度约15cm。所有数据均转为WGS84椭球下中央经线111度的UTM投影。
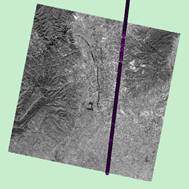
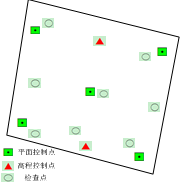
图1. a.太原地区资源三号影像和GLAS数据点位示意图;b.控制点和检查点分布示意图
渭南地区实验范围为:33.955°--35.323°N,107.862°--109.278°E,面积约2万平方公里,实验数据为2012年7月28日、11月13日、11月23日拍摄到的三轨资源三线阵影像,在整个测区有采用GPS外业测量获得的40个高精度控制点(后续作为平面控制点和检查点使用),有2007年3月31日、2008年3月4日、2009年3月28日共三条GLAS轨迹数据,按间隔25公里、50公里、100公里共挑选了14个GLAS点作为高程控制点。
3.2 单景立体平差实验
对于单景立体影像,采用了航空摄影测量里的四角布控方案,为了验证平面和高程控制分离,将四角的控制点只作为平面控制使用,同时沿轨道方向选择两个作为高程控制点。Hobart地区的Ikonos-2影像在中间区域加了一个高程控制数据,太原地区的ZY-3卫星影像在中间加布了一个平面控制数据。平差方案点位分布示意图见图2,具体的方案说明如下:
Ø 平差方案P1:0平面控制点,0个高程控制点;
Ø 平差方案P2:4个角点布4个平面控制点,0个高程控制点;
Ø 平差方案H1:0个平面控制点,沿轨方向3个高程控制点;
Ø 平差方案H2:4个平面控制点,沿轨方向1个高程控制点;
Ø 平差方案H3:4个平面控制点,沿轨方向2个高程控制点;
Ø 平差方案H4:4个平面控制点,沿轨方向3个高程控制点;
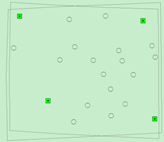
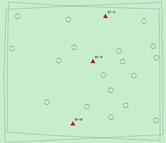
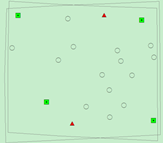
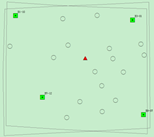
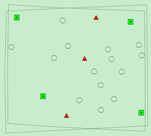

图2. 单景立体影像平差方案点位分布示意图
Hobart地区的Ikonos影像是ISRPS提供的经过一定几何处理后的立体像对产品,因此其无控定位精度可以达到平面3.561m,高程3.612m,其无控高程精度离1:10000立体测图精度还有一定差距。实验中,采用平差方式P2,单独采用4个平面控制点可将平面精度提高到0.837m,而高程精度没有改进;只采用3个高程控制点的平差方式H1可将高程精度提高到1m以内,而平面精度没有改进。在有四个平面控制点的基础上,沿轨道方向逐步加入1个、2个和3个高程控制点,平面精度基本保持不变,而2个高程控制点明显优于只使用1个高程控制点, 3个高程控制点则与2个的平差结果相当。
太原实验区海拔从700米到1400多米,一部分属于平原,一部分属于小高山区域,可能该实验区正好接近在轨几何检校区,因此从表1可以看出其无控高程精度比较高,即使是山区仍可达5.415m,在加入4个角点和1个中心点的平面控制数据后,平面定位精度显著提升,但高程精度没什么变化;选择经筛选后的GLAS激光测高数据作为高程控制数据,如果加入一个高程控制点,高程精度会有一定提升,但效果不是特别明显,而选择加入两个(在沿轨方向靠两头选两个点)则提升精度的效果很明显,可达2.932m。
表1. Hobart以及太原地区单景立体影像平差结果统计表
|
区域 |
平差方案 |
平差 类型 |
控制点个数 |
检查点个数 |
中误差(单位:米) | |||
|
X方向 |
Y方向 |
平面 |
高程 | |||||
|
澳大利亚Hobart地区Ikonos影像 |
P1 |
无控 |
0 |
21 |
2.909 |
2.053 |
3.561 |
3.612 |
|
P2 |
4平0高 |
4 |
17 |
0.579 |
0.605 |
0.837 |
3.620 | |
|
H1 |
0平3高 |
3 |
18 |
3.799 |
2.144 |
4.363 |
0.869 | |
|
H2 |
4平1高 |
5 |
16 |
0.614 |
0.603 |
0.861 |
1.772 | |
|
H3 |
4平2高 |
6 |
15 |
0.629 |
0.596 |
0.866 |
0.865 | |
|
H4 |
4平3高 |
7 |
14 |
0.578 |
0.625 |
0.851 |
0.889 | |
|
太原地区资源三号影像 |
P1 |
无控 |
0 |
15 |
3.881 |
9.033 |
9.831 |
5.415 |
|
P2 |
5平0高 |
5 |
10 |
1.371 |
2.025 |
2.445 |
5.413 | |
|
H1 |
0平2高 |
2 |
13 |
3.862 |
9.013 |
9.805 |
2.943 | |
|
H2 |
5平1高 |
6 |
9 |
1.381 |
2.028 |
2.454 |
4.569 | |
|
H3 |
5平2高 |
7 |
8 |
1.390 |
1.963 |
2.405 |
2.932 | |
3.3 区域网立体平差实验
实验过程中针对陕西渭南地区的9景资源三号卫星影像,分别进行了1种无控和7种有控的平差实验。这8种平差布点方式分别为:
方案P1:无控制点的自由网平差;
方案P2:仅在4个角点共布设4个平面控制点;
方案P3:4个角点和中间沿轨方向共布设7个平面控制点;
方案P4:按三排三列共布设9个平面控制点;
方案H1:仅沿GLAS轨迹方向平均间隔大约25公里共布设14个高程控制点;
方案H2:在方案P4基础上,沿GLAS轨迹方向间隔约100公里选点,共布设9个平面控制点和6个高程控制点;
方案H3:在方案P4基础上,沿GLAS轨迹方向间隔约50公里选点,共布设9个平面控制点和8个高程控制点;
方案H4:方案P4和H1的组合,共布设9个平面控制点和14个高程控制点。
后面7种有控平差的点位分布如图3所示,8种平差结果见表2,中误差的单位为米。



a.平差方案P2 b. 平差方案P3 c. 平差方案P4



d.平差方案H1 e. 平差方案H2 f. 平差方案H3
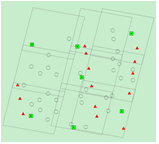

g.平差方案H4
图3. 区域网平差方案点位分布示意图
表2. GLAS高程数据辅助的资源三号区域网平差结果统计表
|
区域 |
平差方案 |
平差 类型 |
控制点个数 |
检查点个数 |
中误差(单位:米) | |||
|
X方向 |
Y方向 |
平面 |
高程 | |||||
|
渭南地区9景资源三号影像 |
P1 |
无控 |
0 |
40 |
8.978 |
9.791 |
13.284 |
13.532 |
|
P2 |
4平0高 |
4 |
36 |
3.421 |
3.973 |
5.243 |
13.351 | |
|
P3 |
7平0高 |
7 |
33 |
3.529 |
3.686 |
5.103 |
13.352 | |
|
P4 |
9平0高 |
9 |
31 |
2.991 |
2.975 |
4.219 |
12.713 | |
|
H1 |
0平14高 |
14 |
40 |
9.656 |
10.068 |
13.951 |
3.066 | |
|
H2 |
9平6高 |
15 |
31 |
3.091 |
2.983 |
4.296 |
5.258 | |
|
H3 |
9平8高 |
17 |
31 |
3.083 |
2.982 |
4.289 |
4.392 | |
|
H4 |
9平14高 |
23 |
31 |
3.058 |
2.985 |
4.274 |
2.903 | |
渭南实验区基本属于高山地区,海拔从350--1800米,高差高达1500米,无控平面定位精度较差,约13.284m,高程定位精度为13.532m,且有明显的系统性误差。加入4个角点作为平面控制点后,平面精度显著提升,高程精度无变化,之后再按7个点、9个点进行只有平面控制的方式进行平差,平面精度有所提高但不显著,高程精度没变化;在没有平面控制的情况下,采用14个GLAS高程控制点,平面精度没有改善,但高程精度得到显著提升,达3.066m;以9个平面控制为基础,再采用间隔100公里、50公里、25公里加入6个、8个、14个GLAS高程控制点,平面精度与仅采用9个平面控制的平差结果相当,高程精度随着GLAS高程控制点间隔的减小而不断提高,其中间隔约50公里时采用8个GLAS高程控制点时高程精度已经可以满足1:5万立体测图要求,而间隔25公里左右选取14个GLAS高程控制点平差后高程精度可达2.903m。
4 总结与展望
文中三个区域、两种不同分辨率的卫星影像进行单景和多景区域网立体平差实验的结果可初步表明:
1)对于卫星立体影像,平面控制和高程控制是可以分离的,单独采用一种控制数据与采用平高控制的结果在精度改进的方向和数值上是一致的,即单纯采用高程控制时,平面精度没有改善,但高程精度的提高与平高混合控制结果是相当的;
2)对于单景采用4个角点或4个角点加1个中心点的平面布控方式,多景采用测区四角点和影像重叠区一定间隔进行平面布控,可以达到很好的平面控制效果,平面精度会有很大的提升;
3)采用同样精度水平的高程控制数据,对Ikonos-2可以将高程提高到0.8m左右,而ZY-3只能提高到2.9m。说明同类型的控制数据,对不同分辨率的卫星立体影像进行平差,其结果精度水平是有区别的,与几何分辨率正相关,这可为未来发射1:10000立体测图卫星提供参考;
4)在平面与高程控制分离进行平差时,单景采用沿轨方向在影像的两端布设两个高程控制点,多景区域网采用沿轨按间隔小于每景覆盖长度(如ZY-3取小于50km的间隔)布设多列高程控制点,即可满足立体平差对高程控制数目的需求。
卫星摄影测量和激光测高是卫星对地观测获得三维地理信息的两项重要技术手段,不同的成像方式决定了前者的平面精度优于高程精度,而后者高程精度优于平面精度,如何将两者进行联合用于全球高精度立体测图是需要研究的问题。文章提出了一种平面和高程控制分离进行平差的新方法,同时对分离后的控制数据分布做了探讨研究,结论对于提高卫星影像平差对多种控制数据源的兼容具有一定的指导作用,同时也为未来发展卫星激光测高数据与光学影像进行集成处理提供了初步参考依据。未来将针对基于卫星影像的不同比例尺地图生产对高程控制数据精度的定量要求,如何提高控制数据自动量测水平进行深入研究。
致谢
本文Hobart地区的Ikonos试验数据由ISPRS网站和澳大利亚墨尔本大学提供,同时得到了测绘地理信息公益性行业科研专项“后续光学测绘卫星应用指标论证与关键技术”(编号:201412007)以及江苏省测绘地理信息科研项目(编号:JSCHKY201410)的支持,在此一并表示感谢。
本文创新点:
针对卫星立体影像,提出了一种平面和高程控制分离进行平差的新方法,同时对分离后的控制数据分布做了探讨研究,结论对于提高卫星影像平差对多种控制数据源的兼容具有一定的指导作用,同时也为未来发展卫星激光测高数据与光学影像进行集成处理提供了初步参考依据。
本文创新点:
针对卫星立体影像,提出了一种平面和高程控制分离进行平差的新方法,同时对分离后的控制数据分布做了探讨研究,结论对于提高卫星影像平差对多种控制数据源的兼容具有一定的指导作用,同时也为未来发展卫星激光测高数据与光学影像进行集成处理提供了初步参考依据。
参考文献
[1]万幼川,刘良明,张永军.我国摄影测量与遥感发展探讨[J].测绘通报,2007,(1):1-4.
[2]王任享.中国无地面控制点摄影测量卫星追述(一)——返回式摄影测量卫星[J].航天返回与遥感,2014,35(1):1-5.
[3]李德仁.我国第一颗民用三线阵立体测图卫星——资源三号测绘卫星[J].测绘学报,2012,41(3):317-322.
[4]陈功,舒宁.控制点影像库在遥感影像几何纠正中的应用[J].地理空间信息,2006,4(1):59-61.
[5]张过.缺少控制点的高分辨率卫星遥感影像几何纠正[D].武汉:武汉大学,2005.
[6]李国元,王华斌,李参海等.1:50000DOM底图更新的快速生产试验[J].测绘科学,2014,39(7):108-112.
[7]王任享,王建荣.二线阵CCD卫星影像联合激光测距数据光束法平差技术[J].测绘科学技术学报,2014,31(1):1-3.
[8] GB/T 23236-2009.数字航空摄影测量空中三角测量规范[S].
[9] CH/T 3006-2011.《数字航空摄影测量 控制测量规范[S].
[10]Teo, T.-A., L.-C. Chen, C.-L. Liu, Y.-C. Tung, and W.-Y.Wu.DEM-aided block adjustment for satellite images with weak conver-gence geometry[J].IEEE Transactions on Geoscience and Remote Sensing, 2010,8(4):1907–1918.
[11]唐新明,张过,祝小勇等.资源三号测绘卫星三线阵成像几何模型构建与精度初步验证[J].测绘学报,2012, 41(2) :191-198.
[12]汪韬阳,张过,李德仁等.资源三号测绘卫星影像平面和立体区域网平差比较[J].测绘学报,2014,43(4):389-395.
[13]Srivastava P., Sr inivasan T., Gupta A., et al. Advanced studies in strip pair processing of Cartosat-1 data[J]. Photogramm Rec., 2008, 23(123):290-304.
[14]李国元,王华斌,潘浩等.基于GLAS激光测高数据的资源三号高精度立体测图研究[C].2014年全国测绘学科博士学术论坛(论文集).2014.5.成都.
[15]喻贵银,李国元.我国建成国家级高精度控制点数据库[N].中国测绘报,2014,19.
