
局部区域表面一致性约束的三维模型纹理映射方法
1 概述 倾斜摄影测量技术被日益广泛地用于逼真地形景观建模,其基本特点是从多角度影像自动获取密集点云数据,通过简化处理生成不规则三角形网格表面模型TIN,并自动映射纹理[1-2]。实际上由于多视影像联合平差精度以及密集匹配生成的点云精度的限制,再...
- 作者:李 媛,胡 翰,朱 庆,张叶廷,杜志强来源:2014测绘学|2015年02月28日
1 概述
倾斜摄影测量技术被日益广泛地用于逼真地形景观建模,其基本特点是从多角度影像自动获取密集点云数据,通过简化处理生成不规则三角形网格表面模型TIN,并自动映射纹理[1-2]。实际上由于多视影像联合平差精度以及密集匹配生成的点云精度的限制,再加上点云简化的不足,导致生成的三角形网格模型表面粗糙,连续区域表面法向量存在噪声从而造成不一致性。这种不一致性导致对应于同一地物表面的三角面片被投影到不同影像上去;同时,由于相机畸变、光照、地物反射特性等原因,不同影像间存在几何和辐射上的差异,最终纹理映射后的结果呈碎片化的状态,导致三维场景真实感不强、也不直观。当前主流的倾斜影像处理软件如Street Factory也都存在类似的问题。
针对纹理映射碎片化问题的解决方法主要有渐入渐出法[3]、光照连续性重建[4-5]以及应用较广泛的多波段融合法[6-10]。这些方法都是从影像出发,通过匀光或色彩融合等处理,使其在灰度上趋向一致。虽然在一定程度上可以使碎片之间的纹理过度更加平滑,但计算量大、算法要求高,容易出现模糊和重影的现象,并且仍然难以消除碎片化的影响。
纹理映射碎片化的根本原因是由于三角形网格模型表面上相邻三角面片间的几何不一致,而被投影到不同影像上造成的。现有方法只是在影像的层面对纹理进行修复,并没有从根本上解决模型表面的几何不一致性问题。因此本文提出一种局部区域表面一致性约束的纹理映射方法,采用一致性约束的区域生长方法和分块区域整体的纹理优选方法,解决上述纹理碎片化的问题。
2算法基本原理
局部区域表面一致性约束的纹理映射方法流程图如图32所示。
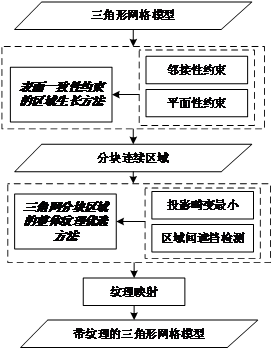
记三角形网格模型为M,S(S∈R3)为其连续表面,即全部有向三角面片![]() 的集合,记作S={t}。首先,在表面一致性约束的前提下,以有向三角面片t为基元,采用表面一致性约束的区域生长算法将S分割为多个分块连续的区域R1,R2……Rn,Ri
的集合,记作S={t}。首先,在表面一致性约束的前提下,以有向三角面片t为基元,采用表面一致性约束的区域生长算法将S分割为多个分块连续的区域R1,R2……Rn,Ri![]() S(1 ≤ i≤ n),且分割结果应在最大程度上满足人们对建筑物几何表面划分的认知,如是连续的、光滑的、建筑物有且仅有一个表面与之对应。接下来,为了保证局部区域内纹理映射的连续性,需要根据区域整体的纹理优选方法,从覆盖区域Ri的多张不同角度的影像中,选择一张最佳影像为Ri提供纹理。最后根据投影矩阵计算Ri上的点在影像上的投影,得到纹理,完成纹理映射。
S(1 ≤ i≤ n),且分割结果应在最大程度上满足人们对建筑物几何表面划分的认知,如是连续的、光滑的、建筑物有且仅有一个表面与之对应。接下来,为了保证局部区域内纹理映射的连续性,需要根据区域整体的纹理优选方法,从覆盖区域Ri的多张不同角度的影像中,选择一张最佳影像为Ri提供纹理。最后根据投影矩阵计算Ri上的点在影像上的投影,得到纹理,完成纹理映射。
2.1表面一致性约束
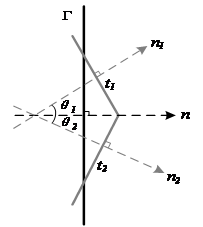
如上文所述,纹理映射的碎片化是由于三角形网格模型表面的几何不一致性引起的,产生不一致性的原因是由于影像平差精度、密集匹配的点云精度的限制以及构网过程中的简化算法不够完善而导致连续区域表面的法向量存在异常噪声。如图33所示,Γ为建筑物真实的表面,n为其法向量,t1、t2为三角网表面两个相邻的三角面片,n1、n2为其法向量。单独来看,t1、t2与Γ之间的夹角θ1、θ2均在噪声容忍范围内,但t1与t2之间的夹角θ = θ1 +θ2却超过了噪声容忍范围,形成噪声。表面一致性约束,不是剔除噪声点,而是通过约束,使噪声点可以与邻近点形成一个具有一致性的区域,即该区域是连续的,并且区域上任何一点在同一张影像上具有相同的可见性。因此,表面一致性约束包括两方面:1)邻接性约束;2)平面性约束。
1)邻接性约束
邻接性约束,即三角面片在空间上是相邻的,从而保证区域的连续性。邻接性约束可通过采用树状的索引结构,如Kd-Tree和R-Tree[11-13],进行半径搜索或K邻接搜索来实现。但是由于三角网密度的不均匀性,进行半径搜索时难以设置合适的阈值以保证每次搜索的有效性,故本文中采取的为K邻接搜索方法。用K邻接搜索方法实现区域生长时,K的取值要适当,既要保证邻接性又要保证区域生长的效率。
2)平面性约束
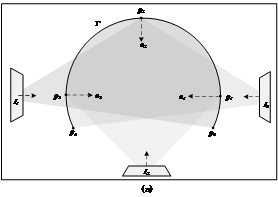
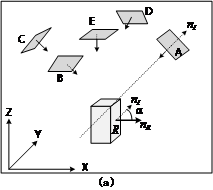
实际中,许多建筑物的表面由连续曲面构成,但是曲面上的点在同一张影像上不具有相同可见性(不考虑其他面的遮挡)。如图34(a)所示,G为建筑物真实的表面,I1、I2、I3是不同角度的拍摄的影像,p0 ~p4为 G上的点,p0 ~ p2为I1的可视范围,p1 ~ p3为I2的可视范围,p2 ~ p4为I3的可视范围,可见G上的点不可能全部投影到同一张影像上,因此需要对其进行平面性约束,用多个平面逼近曲面,如图34(b)。
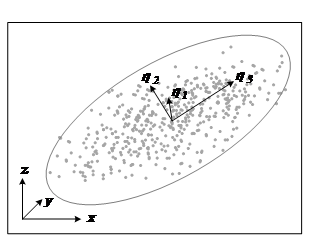
设有向点集P(P∈R3),则P的平面度可以通过其协方差矩阵主成份分析来进行判断[14],对协方差矩阵进行奇异值分解(SVD)后得到特征值σ1<σ2<σ3,η1、η2、η3为对应的特征向量,如图35所示,特征值及其对应的特征向量代表了P在三维空间中的分布情况,σ1越小越P越接近平面,极限情况为σ1 = 0。因此,平面性约束可记为:
 (1)
(1)
σ2 / σ1 > ξ1可保证点集P可近似拟合为平面,而σ3 / σ2 < ξ2则保证避免产生过于狭长的条带。本文中采用这种方法作为平面性约束,既可以约束平面的形状,又对噪声点具有较好的包容特性。
若P满足上述约束,则可拟合出平面Plane ( n0,x),n0为平面法向量,近似于图33中建筑物表面Γ的实际法向量n,x为平面上的点。设P中一点pi的法向量ni与n0之间的夹角记为Angle (ni,n0 ),需满足
![]() (2)
(2)
由前面对法向量噪声的分析可知,(2)式避免了法向量噪声对平面的影响。(1)和(2)共同构成平面性约束。
2.2表面连续性约束的区域生长方法
区域生长以有向三角面片t为基元,采用迭代的策略由种子点向外生长。为了方便计算,由t的几何重心点及其法向量构成有向点p,则全部有向三角面片t的集合S即对应于有向点集P。区域生长需要解决的三个关键问题包括:①种子点的选取;②包含进区域的准则;③生长停止的条件。下面就通过本文中区域生长的过程对这三个问题加以论述:
以P为数据源创建Kd-Tree,记生长出的区域为R,其边界为B,符号⊕(p)表示添加点p,$(p)表示从集合中删除点p,并且每次添加一个点后都需要将它从Kd-Tree中删除,以避免重复计算。首先,从![]() 中任选一点p0作为种子点,R⊕(p0),以p0为中心进行K邻近搜索,本文选择K=20,以要保证邻接性和运算速率,将搜索到的点添加到R和B中,并标记B中所有的点为start;然后以B中第j个点pBj为中心点进行K邻近搜索,若新搜索到的点{pnew}与R中的点一起,满足平面性约束(1)(2),则R⊕{pnew}、B⊕{pnew},标记{pnew}为start,并且B$(pBj);若不满足平面性约束,则标记pBj为end,并开始搜索B中第j+1个点;以此迭代,直到
中任选一点p0作为种子点,R⊕(p0),以p0为中心进行K邻近搜索,本文选择K=20,以要保证邻接性和运算速率,将搜索到的点添加到R和B中,并标记B中所有的点为start;然后以B中第j个点pBj为中心点进行K邻近搜索,若新搜索到的点{pnew}与R中的点一起,满足平面性约束(1)(2),则R⊕{pnew}、B⊕{pnew},标记{pnew}为start,并且B$(pBj);若不满足平面性约束,则标记pBj为end,并开始搜索B中第j+1个点;以此迭代,直到![]() 中所有点均标记为end,或K邻近搜到的结果为空,则停止生长。最后得到的R即为所求的连续区域,它拟合的平面的法向量可视为R的法向量nR,nR是后面选择投影影像时的关键因素。若Kd-tree不为空,则以剩下的点中任意一点为种子点,进入下一个区域的生长。
中所有点均标记为end,或K邻近搜到的结果为空,则停止生长。最后得到的R即为所求的连续区域,它拟合的平面的法向量可视为R的法向量nR,nR是后面选择投影影像时的关键因素。若Kd-tree不为空,则以剩下的点中任意一点为种子点,进入下一个区域的生长。
2.3三角网分块区域的整体纹理映射方法
倾斜摄影测量具有多角度、多时相的特点,因此区域R会被多张影像I1I2……Im同时覆盖。由于R与不同影像间的方位关系不同,R在不同影像上的投影会产生不同程度的畸变;同时考虑到区域间的遮挡关系,R在不同影像上被其它区域遮挡的情况也不同。因此需要选择一张最佳的影像来为R提供整体的纹理。
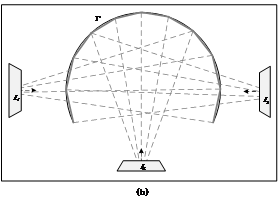
倾斜摄影测量中不同角度影像在空间中的方位是固定的,以五头相机为例,其分布如图36(a)所示。定义ρ为每张影像优先选择的权重,它与两个角度有关:
1)分别计算nR与每张影像投影反方向nI之间的夹角α,选α值最小的几张影像最为备选,理论上它们为同一个相机拍摄的影像,其α角应近似相等。
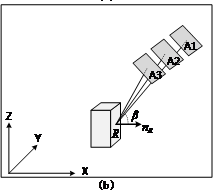
2)以R的中心为起点,连接影像中心,得到向量l,记l与nR之间的夹角为β,如图36(b)所示。β越小R在影像上的投影就越靠近影像中心,投影变形也越小。
另外还需要考虑到区域间的遮挡关系,若R在影像I上被其它区域遮挡,则ρ = 0。ρ最终的确定方式如下:
 (3)
(3)
值最大的ρ所对应的影像即为最优投影影像。
3 实验分析
为了验证上述方法的有效性,本文采用SWDC-5的倾斜摄影影像数据来进行实验。整个测区共被15张影像所覆盖,相机ABCDE分别各有3张影像,影像覆盖区域内共包括道路、建筑物(弧形/非弧形)、操场、植被等多种地物。对这些影像进行多视影像联合匹配后生成点云,再利用构网算法得到三角形网格模型,作为纹理映射的模型基础。
图37显示了区域生长前后的选择最佳投影影像的差异,其中同一种颜色的区域表示映射的为同一张影像。(a)为直接对三角网进行纹理映射的结果,由于三角面片法向量噪声的影响结果产生了大量的碎片;(b)为本文方法进行区域生长后的分割结果,可看出分割后的区域连续且一致,能够将地面和立面、立面和屋顶很好地分割开,并且弧形的建筑物表面被分割为5个连续的近似平面,以保证其能够正确地选择投影影像。若将一个单独的连通区域视为一个映射单元,对于一个有60000个三角面片的三角形网格模型,若直接对其进行纹理映射会产生12531个这样的映射单元,而区域生长后则减少到459个。
图38为纹理映射后的对比结果。(a)为Street Factory建模并进行纹理映射的结果,可看出虽然Street Factory对纹理进行了匀光处理,但仍存在纹理碎片化的现象;(b)和(c)分别为同一个三角形网格模型在逐个三角形纹理映射和一致性约束纹理映射的结果,显然逐个三角形的纹理映射结果受噪声影响较大,尤其是在水面和植被处的纹理碎片化现象严重;而一致性约束纹理映射结果则有显著改善。
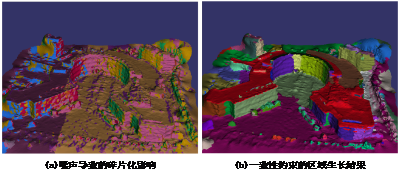
图37区域分块前后对比
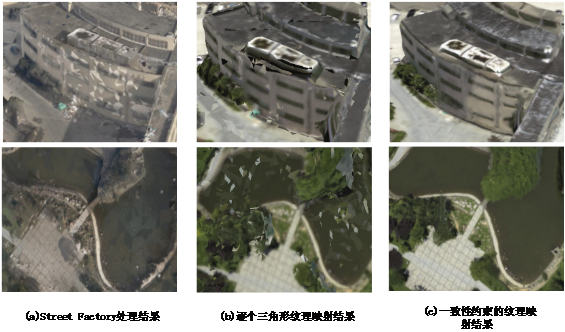
图38纹理映射对比结果
4 结语
本文提出了一种针对三角形网格模型的局部区域表面一致性约束的纹理映射方法,并使用真实数据与Street Factory等商业软件进行了对比试验。表面一致性约束可大大减小三角网表面噪声(尤其是法向量噪声)的影响,顾及这种约束的区域生长方法能够良好地将三角网分割为多个连续的区域,最后为每一个区域选择最优的投影影像。这种化零为整的思想对消除纹理碎片化现象具有显著效果。进一步的研究将针对更加复杂的建筑物场景的真实感表达,消除不同建筑物间的纹理接缝,增强场景的真实感。
参考文献
[]朱庆, 徐冠宇, 杜志强, 于杰, 王晶京. 倾斜摄影测量技术综述[EB/OL]. [2012-05-22]. http://www.paper.edu.cn/releasepaper/content/201205-355.
[2]王伟, 黄雯雯, 镇姣. Pictometry倾斜摄影技术及其在3维城市建模中的应用[J]. 测绘与空间地理信息, 2011, 34(3): 181-183.
[3] Szeliski R. Video mosaic for virtual environments[J]. IEEE Computer Graphics and Applications, 1996, 16(2): 22-30.
[4]李治江, 张祖勋, 张剑清. 三维重建中真实纹理再现的一种有效方法[J]. 地理空间信息, 2004, 02(6): 34-36.
[5]郭玲, 王建宇, 黄炎焱. 真实感3D重建中的纹理映射技术[J].中国图象图形学报, 2007, 12(10): 1881-1884.
[6] Agarwala A., Donteheva M., Agarwala M., et al. Interactive Digital Photomontage[J]. ACM Transactions on Graphics, 2004. 23(3): 294-302.
[7] CédricAllène, J.P.R.K., Seamless Image-Based Texture Atlases using Multi-Band Blending[C]. 19th International Conference on Pattern Recognition, Tampa, Florida, USA, 2008.
[8] Matthew Brown, David G. Lowe, Automatic Panoramic Image Stitching using Invariant Features, International Journal of Computer Vision, 2007,74(1):59-73.
[9]郑顺义, 周漾,结构光系统结合数码相机的小物体高质量纹理重建[J]. 武汉大学学报: 信息科学版, 2012, 37(5): 529-534.
[0]周漾,郑顺义, 黄荣永, 马电, 面泊松融合结合色彩变换的无缝纹理辐射处理[J]. 中国图象图形学报, 2014, 19(4): 512-519.
[1]龚俊, 朱庆, 张叶廷, 李晓明, 周东波. 顾及多细节层次的三维R树索引扩展方法[J]. 测绘学报, 2011, 40(2):249-255.
[2] Shwuhuey Yen, Yaju Hsieh. A KD-Tree-Based Nearest Neighbor Search for Large Quantities of Data[J]. Transactions on Internet and Information Systems, 2013, 7(3):459-470.
[3]Zhengwu Yuan, Yuanhui Wang. Research on K Nearest Neighbor Non-parametric Regression Algorithm Based on KD-Tree and Clustering Analysis[C]. 2012 Fourth International Conference on Computational and Information Sciences, Chongqing. China, 2012.
[4] Bogdan C. Matei, Harpreet S. Sawhney. Building Segmentation for Densely Built Urban Regions Using Aerial LIDAR Data[C]. 2008 IEEE Conference on Computer Vision and Pattern Recognition, Anchorage, Alaska, USA, 2008.
