
基于SVD法的经纬仪测量系统空间数据配准
1 引言 在现代大型装备制造业领域,测量对象的尺寸、形状以及测量环境等都在发生不断的变化,单一经纬仪工业测量系统在有限的空间内具有较高的测量精度,为了实现大尺寸工业组件的高精度测量,必须依靠仪器设备频繁的空间配准来完成,不同测站坐标系变...
- 作者:王鸣翠,于胜文来源:2014测绘学|2015年01月15日
1 引言
在现代大型装备制造业领域,测量对象的尺寸、形状以及测量环境等都在发生不断的变化,单一经纬仪工业测量系统在有限的空间内具有较高的测量精度,为了实现大尺寸工业组件的高精度测量,必须依靠仪器设备频繁的空间配准来完成,不同测站坐标系变换误差随着空间配准过程不断积累与传递,最终影响整体测量精度[1-3]。因此,选取合适的空间配准方法是单一经纬仪测量系统实现大尺寸高精度工业测量的关键。奇异值分解法(SVD)[1,4,5],是在求解最终目标函数(基于最小误差平方和)最小化时所应用的一种矩阵分解算法,本文针对基于奇异值分解法的多测站经纬仪测量系统空间数据配准模型进行探讨,并采用实验数据对奇异值分解法和Leica Axyz系统软件的配准结果进行分析与比较,结果表明,奇异值分解法具有较高的空间数据配准精度。
2 经纬仪测量系统空间数据配准原理
2.1 空间配准模型建立
假设在测量空间布设有若干个配准公共点,经纬仪测量系统在测站1与测站2定义的坐标系分别为:O1-X1Y1Z1、O2-X2Y2Z2,测得的相应公共点坐标点集分别为:P(x,y,z)、Q(x,y,z),则坐标系O2-X2Y2Z2与O1-X1Y1Z1之间有如下配准转换关系[6-9]:

(1)
式中,k为尺度因子;R为旋转矩阵;T为平移矢量。
2.2 奇异值分解法参数解算
空间配准参数求解过程中,通常可以将任意两个同名公共点距离之比的平均值作为尺度因子k,进而求取旋转矩阵R和平移矢量T。
坐标点集P(x,y,z)、Q(x,y,z)的质心![]() 、
、![]() 分别为:
分别为:
(2)
对公共点坐标点集P(x,y,z)与Q(x,y,z)进行质心化,得:
 (3)
(3)
对于公共点坐标点集Q(x,y,z)中的任意点Qi,经过配准后得k·R·Qi+T,理论上配准后Qi的值应与对应点Pi相等,但在实际情况中往往会存在误差,记为![]() ,因此配准的整体误差为:
,因此配准的整体误差为:
![]() (4)
(4)
质心化后的误差为:
(5)
![]() 最小化时,就可以求得旋转矩阵R。
最小化时,就可以求得旋转矩阵R。![]() 最小化等价于
最小化等价于![]() 最大化。令:
最大化。令:

(6)
其中,![]() 。求H的奇异值分解为:
。求H的奇异值分解为:
![]() (7)
(7)
当Trace(RH)达到最大值时,解得旋转矩阵的最优参数为:
![]() (8)
(8)
解算出尺度因子k和旋转矩阵R后,将公共点质心坐标带入式(1)求解平移矢量T为:
![]() (9)
(9)
2.3 空间配准精度评价
目前,通常采用配准前后公共点坐标差值的均方根值来对空间配准精度进行评价[2,5,10]。在理想状态下,经纬仪测量系统在测站2所测得的公共点坐标经过空间配准转换以后,应该与测站1所测得的相应公共点坐标相同,但是在实际情况中,由于测量误差的存在,导致空间配准以后的公共点坐标并不与测站1所测得的坐标一致。因此,可以利用配准后公共点与测站1所测得的公共点之间的距离来描述该点的配准精度,称之为均方根单点配准误差,用RMS表示:
![]()
(10)
式中,![]() ,
,![]() ,
,![]() 。
。
空间配准的整体精度可以利用所有公共点的均方根配准误差来进行衡量,用RMSTotal表示:
 ,
,![]() (11)
(11)
3 实验算例
以山东科技大学测绘学院3D综合实验场为基础,布设用于进行空间配准的公共点6个,采用由两台Leica TM5100A电子经纬仪构成的Axyz经纬仪工业测量系统分别在两个不同测站位置进行观测,如图1所示,获得的公共点坐标数据如表1所示。
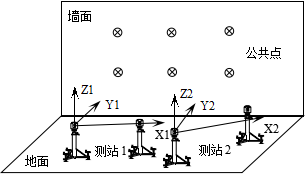
图1 观测示意图
表1 公共点坐标数据
|
点号 |
测站1 |
测站2 |
测站2转测站1 | ||||||
|
X/mm |
Y/mm |
Z/mm |
X/mm |
Y/mm |
Z/mm |
X/mm |
Y/mm |
Z/mm | |
|
1 |
5597.457 |
-9706.465 |
3151.089 |
-101.414 |
9674.357 |
3138.764 |
5597.442 |
-9706.458 |
3151.075 |
|
2 |
5557.029 |
-9754.489 |
253.729 |
-56.091 |
9717.720 |
241.222 |
5557.058 |
-9754.468 |
253.735 |
|
3 |
2999.594 |
-9384.325 |
1757.258 |
2447.058 |
9075.389 |
1744.863 |
2999.619 |
-9384.337 |
1757.245 |
|
4 |
3278.309 |
-9354.779 |
581.716 |
2166.826 |
9075.914 |
569.263 |
3278.281 |
-9354.819 |
581.729 |
|
5 |
816.981 |
-9996.866 |
940.939 |
4683.000 |
9450.276 |
928.540 |
816.946 |
-9996.858 |
940.970 |
|
6 |
609.835 |
-10000.634 |
578.189 |
4889.313 |
9431.794 |
565.713 |
609.858 |
-10000.617 |
578.166 |
分别采用奇异值分解法和Leica Axyz软件对测站2坐标系向测站1坐标系作空间数据配准,将6组公共点坐标数据代入空间配准模型进行解算,表1给出了测站2向测站1作空间配准后的公共点坐标数据,表2给出了奇异值分解法所求得的尺度因子k、旋转矩阵R与平移矢量T。
表2 配准参数
|
R |
T/mm |
k |
|
-0.99423095 0.10726049 -0.00000817 |
4459.042 |
|
|
-0.10726049 -0.99423095 0.00001337 |
-99.504 |
0.99993 |
|
-0.00000669 0.00001417 0.99999999 |
12.392 |
|
计算配准后公共点与测站1相应点坐标之间的偏差,并代入式(10)、(11)计算单点配准误差与整体配准误差,采用奇异值分解法以及Leica Axyz软件进行空间配准的精度结果如表3所示。
表3 公共点配准精度/mm
|
点号 |
奇异值分解法 |
Leica Axyz | ||||||
|
ΔX |
ΔY |
ΔZ |
RMS |
ΔX |
ΔY |
ΔZ |
RMS | |
|
1 |
-0.015 |
0.007 |
-0.014 |
0.022 |
0.156 |
-0.011 |
-0.121 |
0.198 |
|
2 |
0.029 |
0.021 |
0.006 |
0.036 |
0.198 |
-0.004 |
0.061 |
0.207 |
|
3 |
0.025 |
-0.012 |
-0.013 |
0.031 |
0.016 |
0.008 |
-0.025 |
0.031 |
|
4 |
-0.028 |
-0.040 |
0.013 |
0.051 |
-0.020 |
-0.014 |
0.031 |
0.039 |
|
5 |
-0.035 |
0.008 |
0.031 |
0.047 |
-0.197 |
0.008 |
-0.012 |
0.198 |
|
6 |
0.023 |
0.017 |
-0.023 |
0.037 |
-0.153 |
0.013 |
0.037 |
0.157 |
|
最大值 |
0.035 |
0.040 |
0.031 |
0.051 |
0.198 |
0.014 |
0.121 |
0.207 |
|
最小值 |
0.015 |
0.007 |
0.006 |
0.022 |
0.016 |
0.004 |
0.012 |
0.031 |
|
平均值 |
0.026 |
0.018 |
0.017 |
0.037 |
0.123 |
0.010 |
0.048 |
0.138 |
由表3可知,奇异值分解法配准后公共点沿X、Y、Z方向偏差值与单点配准误差均优于Leica Axyz软件的空间配准结果。从整体配准误差来看,奇异值分解法与Leica Axyz软件的整体配准误差分别为0.039mm、0.157mm,奇异值分解法具有较高的空间配准精度。
4 结束语
本文采用奇异值分解法实现了经纬仪测量系统的空间数据配准与转换,该方法原理简单,算法易于实现,计算简便、速度快。利用两测站经纬仪测量系统观测数据对奇异值分解法与Leica Axyz软件的空间配准结果进行了比较,结果表明奇异值分解法准确、可靠,具有较高的空间数据配准精度,为多测站经纬仪测量系统空间数据配准提供了一种更加可靠的方法。
参考文献
[1] 林嘉睿. 大型复杂物体组合测量方法研究[D]. 天津: 天津大学, 2012.
[2] 张皓琳, 林嘉睿, 郑继贵. 三维坐标转换精度及其影响因素的研究[J]. 光电工程, 2012, 39(10): 26-31.
[3] 王少锋, 洪军, 贺巧玲, 等. 大尺寸组合式测量方法[J]. 计算机集成制造系统, 2011, 17(12): 2638-2642.
[4] 张福民, 曲兴华, 叶声华. 大尺寸测量中多传感器的融合[J]. 光学精密工程, 2008, 16(7): 1236-1240.
[5] 杨凡, 李广云, 王力. 三维坐标转换方法研究[J]. 测绘通报, 2010, (6): 5-7,15.
[6] 李广云, 李宗春. 工业测量系统原理与应用[M]. 北京: 测绘出版社, 2011.
[7] 刘尚国. 基于三角法测量系统的工业设备形位检测技术研究[D]. 青岛: 山东科技大学, 2011.
[8] 潘国荣, 周跃寅. 两种坐标系转换计算方法的比较[J]. 大地测量与地球动力学, 2011, 31(3): 58-62.
[9] 曾文宪, 陶本藻. 三维坐标转换的非线性模型[J]. 武汉大学学报·信息科学版, 2003, 28(5): 566-568.
[10] 郭英起, 唐彬, 张秋江, 等. 基于空间直角坐标系的高精度坐标转换方法研究[J]. 大地测量与地球动力学, 2012, 32(3): 125-128.
上一篇:浅谈测量项目风险管理
