 RSS订阅
RSS订阅船载激光扫描系统是在车载移动测量系统的基础上发展起来的,属于移动式激光扫描系统。该系统通过激光扫描仪、惯性测量单元、GPS等多种高精度传感器的集成作用,实时获取船舶的位置和姿态信息;同时,通过激光扫描获取的大量点云数据,构建海岛礁三维数字模型[1]。最终实现以船载激光扫描技术为主的协同信息采集,从而完成不易登陆的海岛礁岸边和周边区域的地形和属性信息的快速提取[2]。
船载激光扫描系统有效地解决了海岛礁岸线表示与测量的问题,同时为海岛礁及周边海域数据整合和地形要素的表达提供了合适的方法。利用船载激光扫描系统可以实现码头、港口、海滩、河岸、堤坝、海岸线、海岛礁等地物、地貌的精确测量,该系统在实际工程应用中具有重要意义。
2 船载激光扫描系统的组成及工作原理
船载激光扫描系统主要由GPS与IMU组合导航系统、激光扫描仪、计算机控制软件和传感器稳定平台等部分组成。
GPS与IMU组合导航系统主要用于实时获取船舶的位置和姿态信息,包括经度、纬度和高程及横滚角、纵摇角和航偏角;激光扫描仪通过向目标发射激光信号来获取实体表面一系列的点云数据,从而构建三维立体模型;计算机控制软件则统筹协调各部分传感器的工作状态,主要包括连接状态和数据状态等;传感器稳定平台保证了整个船载激光扫描系统的稳定性、精确性和可靠性[3]。
2.1 GPS与IMU组合导航系统的工作原理
GPS与IMU组合导航系统集DGPS(Differential GPS)技术和惯性导航(INS)技术于一体,可以测定移动物体的空间位置和三轴姿态信息,并经过卡尔曼滤波,获取高精度传感器的外方位元素,从而实现无或极少地面控制点的定位和定向。GPS与IMU组合导航系统主要包括GPS信号接收机和惯性测量装置IMU(Inertial Measurement Unit)两个部分。
惯性测量装置通过测量载体在惯性参考系中的加速度,最终得到载体在导航坐标系中的速度、航偏角、位置和姿态等信息。它包含了三个单轴的加速度计和三个单轴的陀螺仪。其中,陀螺仪用来形成一个导航坐标系,使加速度计的测量轴在该坐标系中保持稳定,并给出航向和姿态角;加速度计用来测量载体的速度,经过对时间的一次积分得到速度,再经过对时间的二次积分即可得到距离[4]。


图1 NOVATEL系列产品(IMU惯性测量装置)
载体的瞬时位置可由下式得到:
 (2.1)
(2.1)
其中,![]() 为视加速度,
为视加速度,![]() 为引力加速度,
为引力加速度,![]() 为载体在惯性坐标系中的加速度,
为载体在惯性坐标系中的加速度,![]() 为载体在惯性坐标系中的速度,
为载体在惯性坐标系中的速度,![]() 为载体在惯性坐标系中的位置。
为载体在惯性坐标系中的位置。
2.2 激光扫描仪的工作原理
激光扫描仪获取的原始观测数据主要包括:激光束的竖直方向角、仪器到扫描点的距离、扫描点的反射强度等。
船载激光扫描系统对物体进行扫描后采集到的空间位置信息是以特定的坐标系统为基准,通常定义为:坐标原点位于激光束发射处,Z轴位于仪器的垂直扫描面内,向上为正;X轴位于仪器的水平面内与Z轴垂直,指向船舶的行进方向;Y轴位于仪器的水平面内与X轴垂直,同时,Y轴正方向指向物体,且与X轴、Z轴一起构成右手坐标系[5](如图2.2所示)。
激光扫描点的坐标![]() 可由下式表示:
可由下式表示:
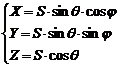 (2.2)
(2.2)
其中,![]() 表示激光束的竖直方向角,
表示激光束的竖直方向角,![]() 表示激光束的水平方向角,S表示仪器到扫描点的斜距。
表示激光束的水平方向角,S表示仪器到扫描点的斜距。
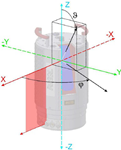
图2 RIEGL VZ1000激光扫描仪坐标系
2.3 系统硬件集成
所有传感器都被固定于稳定的平台上,并用工业测量系统精确测定了各传感器之间的位置和姿态信息,以建立准确的坐标转换关系。此外,传感器稳定平台还安装有减震装置,能在船体晃动幅度较大的情况下,起到良好的缓冲和减震效果,有利于硬件系统的稳固。


图3 船载激光扫描系统硬件集成
3 数据处理问题分析
船载激光扫描系统所获得的数据是一个平面矩形网格上的距离值,可以利用光源与扫描棱镜之间的相对位置与角度,将其转换为被测点的三维坐标。激光扫描仪在载体平台运动的过程中,需要进行实时的数据检查,同时通过设置采样分辨率、扫描距离以及环境参数获取点云数据[6]。
3.1 激光扫描仪数据的组织结构
船载激光扫描系统获取的数据是目标物体表面的三维点云,由于数据处理中涉及大量的邻域信息,因此激光扫描仪数据的表达以及空间拓扑结构将直接影响数据处理算法的可行性和效率,应采用合适的数据结构来对激光扫描仪数据进行表达和组织。
由于Riegl VZ-1000激光扫描仪所获取的点云数据是以其工程文件名.rxp表示的,不便于直接查看,表3.1给出了经过格式转换后的部分激光扫描仪数据。
表1 激光扫描仪数据格式
|
X(m) |
Y(m) |
Z(m) |
Angle(°) |
Time |
|
-3.738 |
0.000 |
1.092 |
105.721 |
201998.31802 |
|
-3.734 |
0.000 |
1.084 |
105.615 |
201998.31815 |
|
-3.737 |
0.000 |
1.078 |
105.592 |
201998.31828 |
|
-3.735 |
0.000 |
1.064 |
105.752 |
201998.31842 |
|
-3.740 |
0.000 |
1.058 |
105.832 |
201998.31855 |
|
-3.739 |
0.000 |
1.046 |
105.557 |
201998.31868 |
|
-3.736 |
0.000 |
1.067 |
105.638 |
201998.31881 |
3.2 传感器网络通信
船载激光扫描系统的研发涉及与多传感器的通信问题,其中主要包括激光扫描仪、GPS与IMU组合导航系统等。
本文中激光扫描仪的采集端程序采用了Qt编程中的网络通信技术,通过将与网络通信有关的函数和数据结构封装成各种类,从而使得程序的开发更加简洁与高效。船载激光扫描系统的通信机制主要取决于监控端和服务端,监控端起到操作指令控制和信息显示的作用,而服务端则起到接收监控端指令并发送命令控制激光扫描仪,进行数据采集和数据存储等作用[7]。
表3.2展示了激光扫描仪数据传输控制协议的主要内容[8]。
表2 Riegl VZ1000激光扫描仪通信协议的内容
|
选项 |
格式 |
字节数 |
注释 |
设置值 |
偏移量 |
|
Signature |
unsigned char |
2 |
标识头 |
0xAA 0x55 |
0 |
|
Version |
unsigned char |
1 |
版本号 |
数值1 |
2 |
|
Check Option |
unsigned char |
1 |
校验选项 |
默认值取1 |
3 |
|
Device Type |
unsigned char |
1 |
设备类型 |
R |
4 |
|
Device ID |
unsigned char |
1 |
设备号 |
数值1 |
5 |
|
Data Length |
unsigned short |
2 |
数据块长度 |
格式选项与数据块长度和 |
6 |
|
Data Format ID |
unsigned char |
1 |
格式选项 |
0x11 0x12等 |
8 |
|
Data |
unsigned char |
D |
数据块 |
0x11 0x12等 |
9 |
|
Check Sum |
unsigned char |
4 |
校验码 |
0xbb 0x66 0xcc 0x33 |
9+D |
本文中监控端是指软件操作界面,通过发送各种命令来实现对扫描仪工作状态的控制。服务器端是采集程序,通过控制端口和数据端口实现与激光扫描仪内部的连接。监控端以报文的形式向服务器端发送请求命令,服务器端侦听到请求命令会立即进行报文解析,并对激光扫描仪实行命令控制。同时,服务器端会将执行情况以反馈信息的形式传输给监控端。监控端与服务器端的网络通信过程如图3.1所示。
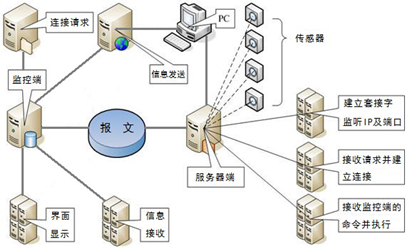
图4 监控端与服务器端网络通信示意图
3.3 多传感器同步测量数据的融合
多传感器数据融合处理的前提条件是从每个传感器获得的信息必须是对同一时刻和同一空间的描述,因此多传感器同步测量数据的融合也就对应着时间数据的融合和空间数据的融合两个方面。本文主要研究激光扫描仪与IMU数据之间的融合,其中涉及到GPS与IMU组合之后得到的位置和姿态数据。
3.3.1 时间数据融合
时间数据的融合包括两个方面:一方面,让所有传感器的记录时间都统一对齐,归算至统一的时间坐标系下;另一方面,由于各传感器的采样频率不同,需要对各传感器所采集的目标观测数据进行内插,将大的观测时间点上的数据推算融合到小的观测时间点上[9]。
船载激光扫描系统需要将激光扫描仪测量的数据归算到GPS时间坐标系下,即时间同步;并采用时间内插的方法实现时间数据的融合。IMU与GPS连接后,起始时间从GPS接收机获取,每隔1s校准一次时间,从而使IMU数据与GPS时一一对应;Riegl VZ-1000型激光扫描仪开始工作时记录起始点的GPS时,从而根据时间间隔计算出后面获取的每一个点数据所对应的GPS时,在激光扫描仪结束工作时再记录一次GPS时,进行校准。
3.3.2 空间数据融合
根据经纬仪测量系统标定得到的传感器之间的安置参数,通过坐标转换可以实现空间数据的融合(如图3.2所示)。
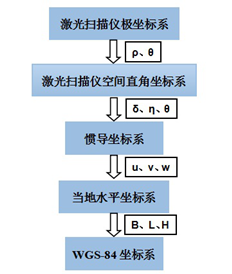
图5 坐标转换流程图
① 从激光扫描仪极坐标系到激光扫描仪空间直角坐标系的转换
激光扫描仪极坐标系的极点与激光扫描仪空间直角坐标系的原点重合,极轴与X轴重合,极平面与XOZ平面重合,两坐标系之间的转换关系可表示为:
 (3.1)
(3.1)
式中,![]() 、
、![]() 为扫描点在扫描仪极坐标系下的坐标值;X、Y、Z为扫描点在扫描仪空间直角坐标系下的坐标值。
为扫描点在扫描仪极坐标系下的坐标值;X、Y、Z为扫描点在扫描仪空间直角坐标系下的坐标值。
② 从激光扫描仪空间直角坐标系到惯导坐标系的转换
惯性测量单元(IMU)的姿态信息由航向角![]() 、俯仰角
、俯仰角![]() 和横滚角
和横滚角![]() 所反映。根据IMU的3个姿态参数可以求出激光扫描仪各个扫描点相对于船舶偏移的平面坐标
所反映。根据IMU的3个姿态参数可以求出激光扫描仪各个扫描点相对于船舶偏移的平面坐标![]()
![]() 。与载体平台所处的瞬时大地坐标值相加,可以获得目标地物在大地坐标下的坐标值
。与载体平台所处的瞬时大地坐标值相加,可以获得目标地物在大地坐标下的坐标值![]() 。按照空间姿态情况,可以将扫描时刻单点的位置坐标与激光扫描仪获得的距离、角度数据进行一一匹配,推算得到激光点云数据,其相对于大地坐标系的坐标转换公式为:
。按照空间姿态情况,可以将扫描时刻单点的位置坐标与激光扫描仪获得的距离、角度数据进行一一匹配,推算得到激光点云数据,其相对于大地坐标系的坐标转换公式为:
 (3.2)
(3.2)
③ 从惯导坐标系到当地水平坐标系的转换
以上计算得到的仍是GPS天线位置坐标,与惯导中心坐标之间存在偏心矢量改正问题。事先在载体平台静止的状态下,可以精确地量测出偏心矢量![]() ;在运动状态下,须根据GPS和IMU组合导航系统测量的姿态参数计算偏心矢量改正后惯导中心的位置[10],其公式为:
;在运动状态下,须根据GPS和IMU组合导航系统测量的姿态参数计算偏心矢量改正后惯导中心的位置[10],其公式为:
 (3.3)
(3.3)
式中![]() 即惯导中心坐标,
即惯导中心坐标,![]() 是前述GPS天线位置坐标(相应于扫描行中心像元成像时刻的坐标),R是由姿态参数
是前述GPS天线位置坐标(相应于扫描行中心像元成像时刻的坐标),R是由姿态参数![]() 组成的旋转矩阵。
组成的旋转矩阵。
 (3.4)
(3.4)
④ 从当地水平坐标系到WGS-84大地坐标系的转换
当地水平坐标系经过旋转平移可转换到WGS-84坐标系中。首先,将当地水平坐标系绕Y轴逆时针旋转90°+B,然后再绕Z轴顺时针旋转L,此时,当地水平坐标系与WGS-84大地坐标系平行。
设激光点云在WGS-84大地坐标系下的坐标值为![]() ,将GPS天线相位中心的
,将GPS天线相位中心的![]() 转换为空间直角坐标系,则有以下关系式:
转换为空间直角坐标系,则有以下关系式:
 (3.5)
(3.5)
其中,![]() 为关于大地经度和纬度的旋转矩阵,e是第一偏心率,N是卯酉圈曲率半径。
为关于大地经度和纬度的旋转矩阵,e是第一偏心率,N是卯酉圈曲率半径。
3.4 算法设计
在进行数据处理时,首先导入惯导姿态数据,根据检校参数得到各个时刻激光扫描仪中心的坐标,以及激光扫描仪的姿态;然后,导入激光点云数据,对其进行解析,从而得到激光点在激光扫描仪空间直角坐标系下的坐标以及GPS时;根据各个点的时间对应查找此时刻激光扫描仪的位置与姿态,即得到构成旋转矩阵的三个角度,以及三个平移参数,再根据坐标转换模型即可得到扫描点在WGS-84坐标系下的坐标;最后,保存点云坐标[9,10]。
① 激光扫描仪数据
typedef struct
{
float startAngle; //扫描起始角
float endAngle; //扫描结束角
float resolution; //扫描分辨率
int scanFrequency; //扫描频率
int scanPoints; //扫描点数
int lineNum; //扫描线条数
double fileSize; //扫描文件大小
double distance; //扫描距离
double scanAngle; //扫描角度
double x,y,z; //坐标
double bwk[3]; //存储姿态信息的数组
double BLH[3]; //存储坐标信息的数组
}Riegl;
② 根据时间查找对应的点位与姿态数据的函数
该函数根据请求的时间,在点位姿态数据中对应地去查找数据,线性插值出此时刻的点位与姿态数据并返回。
void MainWindow::read_ins_message(Riegl &point)
{double min = 1.0;
/*线性内插获取姿态和BLH信息*/
if((point.rieglTime-pointsIMU[num].GPStime)<0){
point.bwk[0]=pointsIMU[num].Roll-(pointsIMU[num].Roll-pointsIMU[num-1].Roll)*min/(pointsIMU[num].GPStime-pointsIMU[num-1].GPStime); //横滚角
point.bwk[1]=pointsIMU[num].Pitch-(pointsIMU[num].Pitch-pointsIMU[num-1].Pitch)*min/(pointsIMU[num].GPStime-pointsIMU[num-1].GPStime); //俯仰角
point.bwk[2]=360-(pointsIMU[num].Yaw-(pointsIMU[num].Yaw-pointsIMU[num-1].Yaw)*min/(pointsIMU[num].GPStime-pointsIMU[num-1].GPStime)); //航偏角
point.BLH[0]=pointsIMU[num].Latitude-(pointsIMU[num].Latitude-pointsIMU[num-1].Latitude)*min/(pointsIMU[num].GPStime-pointsIMU[num-1].GPStime); //大地纬度
point.BLH[1]=pointsIMU[num].Longitude-(pointsIMU[num].Longitude-pointsIMU[num-1].Longitude)*min/(pointsIMU[num].GPStime-pointsIMU[num-1].GPStime); //大地经度
point.BLH[2]=pointsIMU[num].Elevation-(pointsIMU[num].Elevation-pointsIMU[um-1].Elevation)*min/(pointsIMU[num].GPStime-pointsIMU[num-1].GPStime); //大地高}}
3.5 数据融合结果
利用以上数据融合的程序与方法,分别对海岛礁进行了数据采集与点云数据处理,得到了海岛礁的点云效果图(如图3.3所示),与实际的海岛礁示意图(如图3.4所示)作比较,可以发现数据融合的效果较为理想。

图6 海岛礁示意图
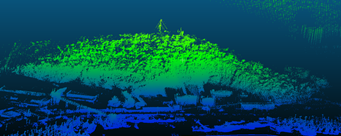
图7 海岛礁点云效果图
4 结论
船载激光扫描系统可同步获取水上、水下地形测量的三维点云数据,并通过“无缝”拼接和数据融合等方法,构建海岛礁三维数字模型。可广泛应用于数字水利、智慧航道、海岛礁测绘等水域测量领域,是继GPS空间定位技术后的又一项测绘技术革新。
本文对船载激光扫描系统研发过程中与数据处理有关的一些关键性问题进行了较为深入的研究与探讨。首先,对该系统的组成、工作原理和工作流程进行了详细阐述。其次,通过分析数据的组织结构与传输协议,深入探讨了传感器之间的网络通信及激光扫描仪数据的传输。然后,定义了多个与其相关的坐标系统,并推导了坐标转换公式,从而将激光扫描仪极坐标系下的点云数据转换至WGS-84大地坐标系。最后,设计算法实现了系统的数据融合。
参考文献
[1] 李鑫.车载移动测量系统误差分析与检校方法研究[D].郑州:解放军信息工程大学测绘学院,2012.15-20.
[2] 山东科技大学测绘学院.我院圆满完成船载多传感器岛礁综合测量系统在西沙群岛的应用示范工作[EB/OL].http://news.sdust.edu.cn/content__D23774D2C0906C092010ADF 00DB03E69.htm,2014-07-02.
[3] 张迪,钟若飞,李广伟.车载激光扫描系统的三维数据获取及应用[J].地理空间信息,2012,10(1):20-24.
[4] 秦永元.惯性导航[M].北京:科学出版社,2006.203-226.
[5] 张会霞,朱文博.三维激光扫描数据处理理论及应用[M].北京:电子工业出版社,2012,12.13-25.
[6] 高志国.地面三维激光扫描数据处理及建模研究[D].西安:长安大学地质工程与测绘学院,2010.18-22.
[7] 霍亚飞.Qt Creator快速入门[M].北京:北京航空航天大学出版社,2012,5.404-436.
[8] 3D Terrestrial Laser Scanner RIEGL VZ-1000(General Description and Data Interfaces)[R]. Riegl , Austria:2011.
[9] 康永伟.车载激光点云数据配准与三维建模研究[D].北京:首都师范大学三维信息获取与应用教育部重点实验室,2009.21-38.
[10] 舒宁.激光成像[M].武汉:武汉大学出版社,2005,8.61-72.
Discussion of Data Processing about Ship-borne Laser Scanning System
WANG Mingwei1 ,YANG Fanlin1,2
(1.College of Geomatics,Shandong University of Science and Technology,Qingdao 266590,China;
2.Key Laboratory of Surveying and Mapping on Island and Reef of NASMG,Qingdao 266590,China)
Abstract:In order to solve the problem of data processing about Ship-borne Laser Scanning System in the research and development process, this paper introduces that the composition and working principle of the system, the parsing of raw data and the network communication between the sensors by analyzing the structure and organization of data transfer protocol, the derivation of the formula of coordinate conversion by using theodolite measuring system to calibrate Ship-borne Laser Scanning System, the transforming of point cloud data from the laser scanner polar coordinate system to WGS-84 geodetic coordinate system. In this paper, the program design aspect uses Qt Creator compile software and is based on Linux operating platform.
Key words:Geodetic techniques; Ship-borne Laser Scanning; network communication; data fusion; coordinate conversion

