 RSS订阅
RSS订阅Research on Leveling Net Adjustment with the Constraint of GPS
Chen Fuchao,Yang Guohua,Han Yueping,Chen Juzhong
(First Crust Deformation and Monitoring Center,CEA)
Abstract: With Tianjin ground subsidence control leveling net and Tianjin GPS continuous observatory data, we calculate GPS continuous observatory in rate of elevation variation. Then by using the rate as constraint conditions we calculated the leveling net again. Compare to the free net adjustment result, these two unit weighted errors are closely approximated. By using the GPS constraint conditions so that the error of the average variation decreases as the 3/5 of the free net. This new adjustment method can reduce the error obviously and make the error distributes evenly. Also it control the error spreading. It proves that adjustment with GPS restriction is better than the free net adjustment. This new method can be popularized.
Key words: Geodesic survey;leveling survey;GPS rate constraint;dynamic adjustment
1. 引言
本文利用GPS高程分量的变化量作为水准测量平差的约束条件和动态起算基准进行水准网平差,与动态自由网平差计算结果比较,显示两种平差计算得到的单位权中误差相差不大,近似相等。但由于GPS约束条件增加,平均速率误差是自由网平差的3/5,误差明显减小,且分布均匀。说明GPS约束条件下的水准网平差能够有效地控制误差传播,明显优于动态自由网平差方法。最为重要的是这一平差方法能够为区域水准复测资料用于地壳垂直形变分析提供可靠的动态起算基准,在GPS连测观测资料和水准连测资料满足条件时,还能够成为全国一等水准网平差计算提供起算参考基准的备选方案,具有广泛的推广应用价值[1,2]。
2. 数据整理计算
天津市从上世纪50年代开始逐步建立城市高程控制水准网,特别是1985年天津市政府决定控制地面沉降开展地面沉降监测以来,经过多次加密改造形成了较完整的水准网(一、二、三、四等),到目前为止,一等水准网达到了1600余千米,每年进行一期水准测量。2005年天津市完成CORS网的建设,12个GPS连续站开始了正常观测。为本研究提供了十分重要的资料基础。
2.1水准测量数据
天津市地面沉降一等水准网与GPS连续站分布见图1。一等水准路线长度1600km,由于两期间会有水准点破坏与补埋等情况,各期和各时段的水准点数量会略有不同。在整理2006年至2010年五年的水准资料基础上,合并整理成2006年-2007年、2007年-2008年、2008年-2009年、2009年-2010年、2006年-2008年、2008年-2010年、2006年-2010年7个时段的水准资料,目的是要合并不共点高差,计算到共点(两期都测定了高差的水准点)高差中。整理成能够为下一步平差计算的数据格式。各期的数据最少为377个测段高差(2006年-2010年时段),最多的为492个测段高差(2006年-2007年时段),平均每期有438个测段高差。各时段平均测段长度为3.57km。

图1. 天津市地面沉降一等水准网与GPS连续站分布
2.2 GPS数据处理
为了配合水准测量平差,GPS资料也做了必要的数据整理,在解算GPS连续站每日数据结果的基础上,对于各年度连续观测天数大于300天的GPS站点进行了数据处理,因此,各时段的GPS约束点不尽相同。首先计算(与水准测量时间相对应的)GPS高程分量的年速率,依据是GPS高程分量的时间序列的形态来决定使用的计算方法和公式[3,4],实际计算中使用了三种方案。
①仅线性项年速率及误差
②年周期+线性项年速率及误差
③年、半年周期+线性项年速率及误差
得到三种情况下的各个时段GPS连续站的年速率,表1只给出了2006-2007时段的年速率和速率误差计算结果,其它时段略。
表1. 2006.7900-2007.7870计算结果
|
测站名 |
仅线性项 年速率及误差mm/a |
年周期+线性项年速率及误差mm/a |
年、半年周期+线性项年速率及误差mm/a |
|
CH01 |
-29.65±0.69 |
-39.29±0.86 |
-39.75±1.08 |
|
CH02 |
-8.46 ±1.24 |
7.55±1.18 |
-2.54±1.25 |
|
DZ01 |
-3.95±0.54 |
-8.51±0.80 |
-5.48±0.98 |
|
DZ02 |
-22.13±0 .84 |
-10.27±0.86 |
-12.79±1.08 |
|
KC01 |
-7.90 ±0.79 |
-15.93±0.91 |
-13.79±1.15 |
|
KC02 |
-20.14±0 .58 |
-25.58±0.83 |
-25.57±1.05 |
|
KC03 |
-7.29±0 .70 |
-18.66±0.80 |
-17.14±1.00 |
|
SW01 |
-38.15±0 .74 |
-34.37±0.96 |
-39.06±1.14 |
|
TJA1 |
-9.01±0 .82 |
-2.96±1.09 |
-8.52±1.06 |
|
TJA2 |
4.35±0 .85 |
10.58±1.07 |
5.85± 1.29 |
|
YC01 |
-16.50±0.64 |
-20.89±0.89 |
-17.15±1.10 |
|
JIXN |
7.48±0 .75 |
5.01±1.18 |
5.87±1.50 |
由于GPS连续站观测数据时间序列呈现周期性变化规律,为了计算GPS高程分量的年速率值与水准复测资料在时间上同步,在GPS高程分量的数据处理时,考虑截取GPS的时间段数据与水准复测的时间段同步。以此时间观测序列数据求得的速率作为GPS约束条件的年速率观测值。对12个GPS连续站数据的实际处理结果表明,采用年周期+线性项的结果是显著的,说明GPS观测数据的时间序列数据的年周期是显著的,而比一年更短的周期(如半年)变化都不能通过显著性检验,半年周期不很显著。在进行水准网平差计算时,试算结果也表明采用年周期+线性项的处理结果作为约束条件进行水准网平差优于其它结果。因而本文在确定GPS连续站的沉降速率观测值时,只考虑了年周期项来确定线性沉降速率和误差估计,作为水准网平差计算时的速率约束值和对该速率约束值加权的依据。
3. GPS约束与平差计算
3.1高程变化
大地高系统以参考椭球面为基准面,地面上某一点A的大地高的高程是该点沿其法线到椭球面的距离Hd。正常高系统是以似大地水准面为基准面,A点的正常高的高程是由A点沿其正常重力线到似大地水准面的距离Hr。两种高程系统下的法向方向与正常重力线(在子午圈内存在弯曲)方向存在一个很小的角度,见图2。
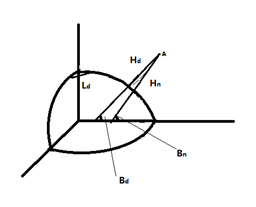
图2.大地法线与正常重力线关系图
这个角度可以用公式1)估算:
![]() 1)
1)
这个角度引起的两种高程差可以用公式2)估算[5]:
![]() 2)
2)
Hn为地面点A到沿正常重力线到参考椭球面的距离;
Hd为地面点A的大地高程;
β为重力的扁率,0.005302;
R为地球的平均半径,6370km;
Bn为大地纬度。
由1)和2)式计算可知,当高程为10km(地球上不可能出现的高度)时,大地高的法线方向与正常高的正常重力线方向夹角![]() 不大于2”,两种高程的差值
不大于2”,两种高程的差值![]() 不大于0.00012mm。这个差值相比水准测量精度而言可以忽略不计,因此可以认为两种高程系统下的高程变化量是相等的。当A点垂直位移到A’时,
不大于0.00012mm。这个差值相比水准测量精度而言可以忽略不计,因此可以认为两种高程系统下的高程变化量是相等的。当A点垂直位移到A’时,![]() ,这就是用大地高的变化量替代正常高的变化量作为水准网平差时的约束条件和起算基准的依据,也为利用GPS高程分量(速率)等同于水准复测数据用于研究地壳垂直形变提供了理论基础[6,7]。
,这就是用大地高的变化量替代正常高的变化量作为水准网平差时的约束条件和起算基准的依据,也为利用GPS高程分量(速率)等同于水准复测数据用于研究地壳垂直形变提供了理论基础[6,7]。
3.2水准网平差
具有约束的经典平差的函数模型是
![]()
![]() (1)
(1)
![]() (2)
(2)
式中![]() ,
,![]() ,
,![]() 。统计模型是
。统计模型是
![]()
![]() (3)
(3)
按最小二乘原则,组成函数:
![]()
求X偏导得:
![]()
将误差方程代入,并联合约束条件(2)得
 (4)
(4)
解之,得
![]() (5)
(5)
![]()
代入(5)式得
![]()
式中右边第一项为不顾及约束条件时的参数估计值,后一项为顾及约束的改正项[8]。
用满足条件的天津市GPS连续站,以及经过整理的各期的地面沉降监测网的一等水准复测资料,采用GPS连续站高程年速率作为约束的平差和动态自由网平差(采用一个起算点并假定该点运动速率和速率误差为零),计算得到了两组平差计算结果。表2是各时段的两种平差结果的速率及速率误差对比。
表2.两种平差误差比较表
|
时段 |
平差方法 |
单位权中误差±mm/km |
速率误差最小值±mm/a |
速率误差最大值±mm/a |
各点速率误差均值±mm/a |
|
2006-2007 |
GPS速率约束 |
0.66 |
0.53 |
5.96 |
3.57 |
|
经典动态自由网 |
0.63 |
0.63 |
8.24 |
6.02 | |
|
2007-2008 |
GPS速率约束 |
0.77 |
0.56 |
7.35 |
4.13 |
|
经典动态自由网 |
0.76 |
0.75 |
9.78 |
7.16 | |
|
2008-2009 |
GPS速率约束 |
0.63 |
0.51 |
5.97 |
3.60 |
|
经典动态自由网 |
0.66 |
0.66 |
8.36 |
6.02 | |
|
2009-2010 |
GPS速率约束 |
0.91 |
0.64 |
8.91 |
4.82 |
|
经典动态自由网 |
0.71 |
0.67 |
9.81 |
7.28 | |
|
2006-2008 |
GPS速率约束 |
0.76 |
0.81 |
3.27 |
2.22 |
|
经典动态自由网 |
0.73 |
0.36 |
4.65 |
3.38 | |
|
2008-2010 |
GPS速率约束 |
0.85 |
0.89 |
3.99 |
2.49 |
|
经典动态自由网 |
0.80 |
0.38 |
5.05 |
3.66 | |
|
2006-2010 |
GPS速率约束 |
0.85 |
1.02 |
2.23 |
1.52 |
|
经典动态自由网 |
0.80 |
0.19 |
2.56 |
1.85 |
注:表中动态自由网平差是以宝坻原点为起算点,其速率与速率误差为0,速率误差最小值中不含起算点;各点速率误差均值不包括GPS连续站。
由于篇幅限制,这里只给出了2009-2010年度时段经典动态自由网平差与GPS约束下的水准网动态平差的速率误差分布图与速率分布图,见图3-6。
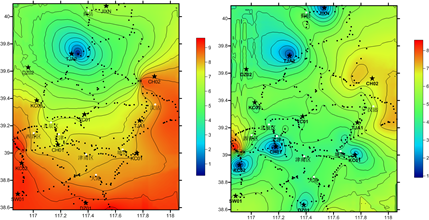
图3.自由网平差速率误差分布图 图4. GPS约束平差速率误差分布图
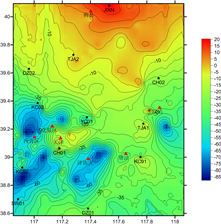
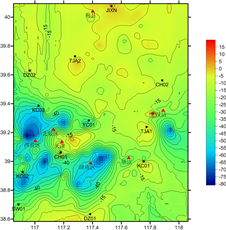
图5. 自由网平差速率分布图 图6. GPS约束平差速率分布图
4. 分析与结论
从表2两种平差误差比较表中可以清楚地看到单位权中误差相差不大,一年尺度中,2009-2010时段单位权中误差最大,分别是±0.91mm/km和±0.71mm/km,它们相差也是最大为±0.20mm/km。其它时段的单位权中误差相差不大于±0.05mm/km。单位权中误差主要体现的是测量本身的精度,由于加入了GPS连测和支测(支测GPS点时为二等水准精度)水准数据,必然会使单位权中误差有所增大。速率误差最小值中一年尺度的GPS约束下的平差结果比动态自由网平差结果普遍要略小一点,两年或以上尺度时段的动态自由网平差结果随着时间尺度的增加速率误差最小值逐步变小,这是平均年速率误差计算方法引起的结果,2006-2010时段的速率误差最小值是一年尺度的1/3量级,达到了±0.19mm/a。速率误差最大值中GPS约束下的平差结果普遍比动态自由网平差结果普遍要略小一点,说明GPS约束下的平差方法能够有效地控制误差的传播增大,所有点的速率误差均值也说明了这一点,GPS约束下的平均速率误差为±3.19mm/a,动态自由网的平均速率误差为±5.05mm/a,平差结果不仅能够说明GPS约束下的平差是控制误差传播增大的有效途径,同时可以说明GPS约束条件符合实际情况,更能够说明GPS测量的大地高变化量能够替代正常高变化量的理论依据是正确的。
从图3和图4的速率误差分布图中可以看到,误差大小的分布有明显的差异和变化。自由网动态平差方法下的速率误差沿起算点(宝坻原点)向四周扩散,距离起算点越远的地方,其误差越大。而在GPS约束下的平差结果的速率误差围绕GPS约束点为起算向外扩展,从而有效地控制了误差的传播增大。由于GPS连续站总体上比较均匀地分布在一等水准网中,对水准网的整体误差分布起到了非常好的作用。GPS连续站在水准网中的分布均匀、密度合理,GPS连续站的观测环境良好,接收记录数据连续完整更是重要的条件,是以GPS连续站作为水准测量的平差计算起算基准依据基础。
图5和图6则反应两种方法下地面沉降速率形态基本保持一致,在细部与沉降量级上有所改变。图中北部地区由自由网平差得到的速率图中由地面上升(红色)区域,而由GPS速率基准平差方法下得到的速率基本没有出现地面上升的情况。从量级上讲,有大约10mm量级的差异。
利用天津12个GPS连续站与天津市地面沉降水准复测资料,获取GPS连续站高程分量的时间序列的垂直变化信息,以此速率为约束条件进行动态平差计算,很好地解决了水准测量起算点的运动量和稳定性的标定问题。并有效地控制了误差传播增大问题,使得水准测量平差结果更符合客观实际,使垂直形变分析更为客观可靠。
如果全国的两期以上一等水准测量连测了GPS连续站水准,这一平差方法就能够应用于全国一等水准网平差计算中,不仅能够使全国一等水准网的误差分布得到优化,提供给出更为符合客观实际的高程,而且还能够提供给出水准测量时刻的起算(原点)点的高程。
参考文献
[1] 陈阜超,等.水准测量起算基准稳定性研究[J],中国科技成果,2011,(15):39-41
[2] 陈阜超,等.李七庄基岩点稳定性研究[C],2010中国测绘学会年会论文集
[3] 黄立人,等.GPS连续站在地面沉降监测中的应用[J],工程地质学报, 2005, (13)1: 94-97
[4] 黄立人,等. GNSS连续站坐标的高程分量时间序列在地壳垂直运动研究中应用的若干问题[J],大地测量与地球动力学,2012(32)4:10-14
[5] 武汉测绘学院天文与重力测量教研组编著,大地重力学[M], 北京:中国工业出版社,1961
[6] 黄立人,等.论地面垂直变形监测中应用GPS技术的可能性[J], 地壳形变与地震,2000(20)1: 30-37
[7] 杨建图,等.GPS测量地面沉降的可靠性及精度分析[J],大地测量与地球动力学,2006,(26)1:70-75
[8] 陶本藻. 自由网平差与变形分析[M],北京:测绘出版社,1984
[9] 陈阜超,等.李七庄基岩点垂直形变趋势研究[J],大地测量与地球动力学,2013(33)6:49-52
[10] 陈鑫连,动态大地测量[M].铁道出版社,1993
[11] 万斐,拟稳平差在测量数据处理中的应用[J],地理空间信息,2008,6(6):79-82
[12] 于正林, 自由水准网的动态平差[J],武汉测绘学院学报,1981,1:72-82

